专访CMU Argo Lab首席科学家John Dolan:自动驾驶的技术攻坚在“最后5%”的长尾问题,L5级自动驾驶仍然遥远
CMU(Carnegie Mellon University,卡耐基梅隆大学)拥有世界顶尖的计算机科学学院,而不为人所知的是,CMU也是当代自动驾驶技术的发源地——1984年CMU校内第一代Terregator的诞生,奠定了自动驾驶“自主识别和驾驶”的baseline,也开启了CMU在此基础上长达30余年的自动驾驶研究征程。在自动驾驶的影响力名录上,CMU系学生和校友也占据着绝对份额:被誉为“自动驾驶之父”的Sebastian Thrun曾是CMU机器人学习实验室的助理教授和主任;通用汽车视觉系统的BFO(BOM Family Owner)张文德曾是CMU 无人车团队的主力成员之一;而放眼创业公司,CMU也是当代自动驾驶技术的发源地“几乎所有的自动驾驶汽车项目都与Pomerleau教授以及CMU的Nav lab有千丝万缕的联系”。
 36氪独家对话CMU Argo Lab人工智能无人驾驶研究中心首席科学家John Dolan,从学者角度分析自动驾驶的技术难点和研究现状,介绍自动驾驶的学界研究情况。
36氪独家对话CMU Argo Lab人工智能无人驾驶研究中心首席科学家John Dolan,从学者角度分析自动驾驶的技术难点和研究现状,介绍自动驾驶的学界研究情况。
专访内容经36氪整理如下:
自动驾驶简述:“20年实现自动驾驶”的辉煌图景
技术攻坚:“最后5%”
真实应用场景:毫无价值的100%
竞争:领先地位与后发优势
自动驾驶:“20年实现自动驾驶”的辉煌图景
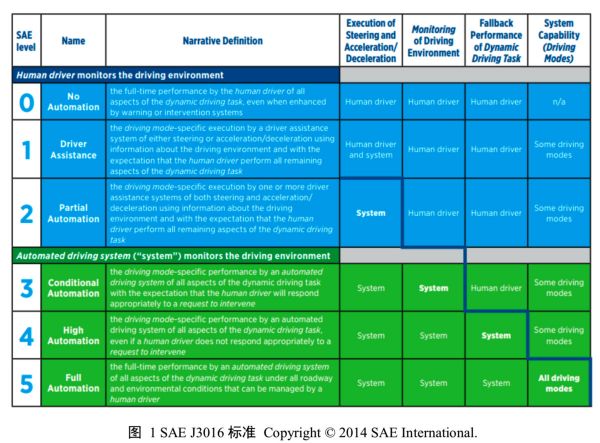
按照国际通用标准,根据智能化程度的不同,自动驾驶汽车可以被分为5个等级:L1-辅助驾驶、L2-部分自动驾驶、L3-有条件自动驾驶、L4-高度自动驾驶、L5-完全自动驾驶(无人驾驶)。通常所说的“自动驾驶”,一般指L3及以上的高等级自动驾驶汽车。
从全球范围来看,L1/L2级别的自动驾驶汽车已经实现了大规模量产。而踩在“自动驾驶”实现边缘的L4级别自动驾驶汽车目前却仍处于测试,或“在限定区域、限定人群”的小范围应用阶段。
“很多公司在过去几年中一直在向外发声:‘我们距离自动驾驶很近了 (we are really close to auto-driving)’或者‘我们将在未来20年内实现自动驾驶’,然而事实并非如此。”在John Dolan看来,真正意义上L5级别的“自动驾驶”,仍然非常遥远。
问题来自两方面:底层技术和真实应用场景。
技术攻坚:“最后5%”的长尾问题
“学界的共识是,我们已经在高速公路的场景中很接近“自动驾驶”,但我们距离在城市中实现自动驾驶还很远(we are pretty far from having cars in cities)。”
在自动驾驶的讨论中,当前的自动驾驶在驾驶体验中体现为:人们不再需要注意路障。然而这个简单的需求,实际上需要一个整合的系统去满足,而想要使用一个完整的计算机系统去处理所有实际场景中可能出现的问题,难度极大。
在John Dolan教授看来,2006-2007年,学界划定的关于自动驾驶的研究已经形成了相对完整的架构,学界和产业界的理论架构是:
高层:环境感知(mission planning)
中层:行为决策(behavior planning)
底层:运动控制(motion planning)
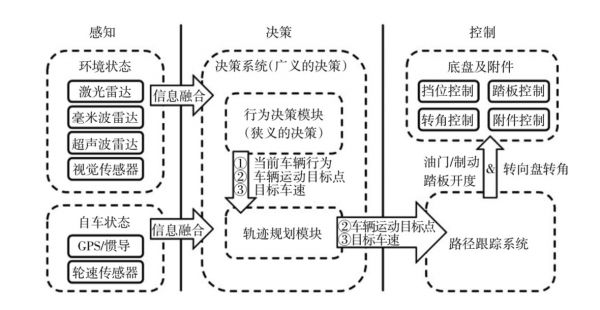
John Dolan教授指出:
完成这些不同层次的要求需要不同的技术和算法,并要求整体的技术架构要在规模部署下完成系统功能,实现类似人类驾驶的行为。已渐完善的现有技术的发展确实拉高了技术的基础线:如GPS提高了定位和路径规划的精准度;深度学习,特别是计算机视觉的发展为自动驾驶提供了更强的支撑。物质(material)的天花板正由制造业和车企一同打破,但自动驾驶作为一个整合的系统,还需要行业内整体系统硬件的效率、算力和计算速度的发展。
自动驾驶作为与人紧密相关的日常活动,其整体的技术实现要求的不仅仅是算法和软件的高效运行,还有交互系统的准确运转。在技术架构的中层,决策系统已经从狭义的车辆行为决策,到要求行车“不仅能根据感知层输出的信息合理决策出当前车辆的行为,还要了解和预测汽车行驶中的外界环境,预测突发事件”。人类行为,作为所有模型中的factor X,正在成为自动驾驶中最难攻克的艰深课题。
在自动驾驶中,底层架构和大部分的技术问题已经被解决,而剩下的5%的并未解决的问题,逐渐成为制约自动驾驶发展的决胜手。“最后5%”的长尾问题遍布于零碎的场景、特殊极端情况和永远无法预测的人类行为,在算法、传感器、计算平台和法规的不同层面,困扰着学界和业界。
真实应用场景:毫无价值的100%
为了更好的实现最后5%的跨越,许多公司选择增加真实实验。
然而在John Dolan看来,实验室实验和真实应用场景的认知差异是巨大的:实验室数据和模型的精准度和可信度,在现实环境中可能毫无价值:实验室环境的模拟(simulation)只能使得实验环境尽量模拟真实环境,却始终满足真实(wild)场景的实验环境设定;实验室场景的算法和系统准确度具有批判性(critical):科学家们必须不断优化部署,使得算法的可靠性不断提高,而真实情况往往是:即使是满足了100%准确率的实验,在现实生活中也不一定可行。
除了实验室与真实场景的差异,真实场景下也存在差异。“即使在某个城市进行了自动驾驶的成功试验,也并不意味着我们可以在另一个城市复制成功经验。不同的社会、城市、驾驶环境和驾驶风格(driving style)都会影响自动驾驶的运行情况。这也是为什么大多数企业始终在坚持在不同场景、不同城市下的进行真实实验的原因。”
“只有在算法不精准模拟的“最后5%的特殊情况”解决之后,我们才能判定:我们实现了L5级别的自动驾驶”。John Dolan介绍道。
可靠性:自动驾驶领域的核心问题
在自动驾驶领域,安全性和可靠性始终是核心问题。
在Uber无人车事故的一年后的今年,NTSB发布的一份新报告显示:Uber自动驾驶测试车的硬件并没有出现问题,设计存在缺陷的软件导致了这起致死事故的发生。Uber的无人车事故警示了一众无人驾驶公司:安全性问题需要在L5来临之前得以解决。
目前,在当前自动驾驶主要依靠的是学习机制。机器学习将作为其中的重要支撑,对于现实情况进行分析,但这部分的研究也才刚刚开始。
当前的理论引入还包括:
形式化验证(formal vertification),即用数学工具进行定义、开发和验证(specification, development and verification)。然而自动行驶的实际情况往往远高于
临时消息检验(adhoc message),即通过及时采取的信息进行计算,并列入预测机制。
安全性和可靠性的推动为何如此急切?
因为自动驾驶的发展正在引起大众的注意,吸引着来自外界的压力。
政府是最重要的外部力量。高效的可信赖度(high-enough reliability)的问题正在被各地的政府强调,而政府部门控制着真实场景的试验权利。
社会中的道德和心理问题也不容忽视。“全世界每年有124万人死于交通事故,其中91%的死亡交通事故发生在低收入和中等收入国家。自动驾驶或许并不会改变交通事故的伤亡人数,但对于自动驾驶应用后不变的伤亡结果,人们的心理却大不相同。”John Dolan介绍道,“人们希望机器能比人犯更少的错误,虽然这类期望(Expectation)并不对。”
而在长途卡车运输已经成为自动驾驶的最佳舞台的当下,自动驾驶的安全性和可靠性也与运输成本、运输有效性挂勾 :理想化的状态是,自动驾驶的卡车能提高远程运输的有效性,并将货物安全送至目的地,而不是因为事故造成大宗货物损失。
这就涉及到强调自动驾驶可靠性和安全性的另一个维度:经济效应。自动驾驶的影响是双向的:当自动驾驶深入街道,司机的生存和就业空间会受到影响;另一方面,自动驾驶的服务仍然是高价的,并非所有人都能支付该服务,自动驾驶的不稳定性也会影响乘客的支付意愿——乘客会思考:一个并不稳定或你安全的自动驾驶服务,是否值得我购买?
竞争:领先地位与后发优势
在自动驾驶方面,学界的重要性是不言自明的:学界为产业界输送的不仅仅是技术研究,更多的是优质的人力资源。
作为“自动驾驶的黄埔军校”,CMU的自动驾驶合作伙伴名单上既有Uber、Argo此类自动驾驶科技公司,也包括通用等大型车企。来自CMU的毕业生创业公司更占据了自动驾驶创业公司的半壁江山——John Dolan教授曾在2007 DARPA城市挑战赛(DARPA Urban Challenge)中带领CMU无人车团队(Carnegie Mellon's Tartan Racing Team),而仅该竞赛队里,就走出了多家自动驾驶独角兽或新锐公司:包括Argo AI创始人Bryan Salesky、Aurora创始人Chris Urmson、Cruise的创始人Kyle Vogt和Zoox创始人Jesse Levinson。
在John Dolan看来,当下的校企合作有利有弊:优势在于,学校可以分享实验数据,但弊端在于,出于竞争性的考虑,大多数行业巨擘会保留部分实验数据和结果,出于数据安全和商业机密的考虑。来自硅谷的大型企业往往雄心勃勃,他们具有极强的AI人才优势、大笔的融资和极强的算力支持,但这些硅谷的企业往往容易出于商业考虑,而忽视技术的稳定性和可信度,这与实验室内科学家们的严谨精神实际上存在冲突。
“我们需要坚持我们的追求”,John Dolan笑道。
在自动驾驶的先发企业竞速之外,中国市场正凭借巨大的市场潜能和雄厚的资本展现出后发优势。
而从John Dolan的学者角度看来,中国的很多自动驾驶的企业正在冲击自动驾驶的格局:2019年9月,安波福(Aptiv)全球工程副总裁韦峻青宣布加入滴滴自动驾驶公司任CTO,向CEO张博汇报。韦峻青也是John Dolan的学生。而在36kr最新发布的2019 年「新经济之王」的榜单中,「小马智行」、「文远知行」榜上有名,其中,「小马智行」的创始人张一萌、「文远知行」技术SVP钟华均为CMU校友。
而谈及中国市场,John Dolan说:“我们认为向好的进步正在发生。中国的自动驾驶曾落后于美国,但巨头驱动的中国市场无疑会迅速发展。”
据2018年麦肯锡未来出行研究中心发布的报告显示,“中国未来可能成为全球最大的自动驾驶市场,直至2030年,自动驾驶相关的新车销售及出行服务创收将超过5000亿美元。”目前,大量的中国企业正着手开发自动驾驶技术架构的核心构成要素,包括激光雷达、摄像头、处理器、软件和地图/基于位置的服务等。在2012至2017年间,约有70亿美元的风险投资投入到中国的自动驾驶技术企业,这一数额与在同期投资于美国初创企业的金额相当。中国的平均交易规模是7200万美元,是美国平均交易规模的两倍。
本文参考了多个学术论文和期刊来源。刘轩对本文亦有贡献。
相关推荐
专访CMU Argo Lab首席科学家John Dolan:自动驾驶的技术攻坚在“最后5%”的长尾问题,L5级自动驾驶仍然遥远
Argo AI,被大众pick的自动驾驶公司
硅谷自动驾驶五大家族“圈地”简史
最前线 | 特斯拉CEO马斯克:有信心今年实现L5自动驾驶,正建立中国自动驾驶团队
苹果联合创始人:我真的要放弃L5自动驾驶了
特斯拉自动驾驶被控虚假宣传,马斯克的自信从哪里来?
自动驾驶拉得动百度吗?
特斯拉进“无人区”:马斯克在自动驾驶上放的嘴炮,能实现吗?
自动驾驶,巨头们的一场持久战
万亿狂欢,自动驾驶“钱”进中局
网址: 专访CMU Argo Lab首席科学家John Dolan:自动驾驶的技术攻坚在“最后5%”的长尾问题,L5级自动驾驶仍然遥远 http://www.xishuta.com/newsview13564.html
推荐科技快讯







- 1问界商标转让释放信号:赛力斯 95223
- 2人类唯一的出路:变成人工智能 21152
- 3报告:抖音海外版下载量突破1 21115
- 4人类唯一的出路: 变成人工智 20311
- 5移动办公如何高效?谷歌研究了 20306
- 62023年起,银行存取款迎来 10332
- 7五一来了,大数据杀熟又想来, 8568
- 8网传比亚迪一员工泄露华为机密 8497
- 9滴滴出行被投诉价格操纵,网约 8188
- 10顶风作案?金山WPS被指套娃 7230



