外骨骼机器人离我们有多远
2019年开始没多久,两部新上映的科幻影片——《流浪地球》和《阿丽塔》就相继成为人们热议的话题。《流浪地球》中,救援队员们身穿外骨骼机甲在恶劣的地表为生存而奋战,千里徒步送火石在这身装备的支持下成为可能;《阿丽塔》中,人类失去的肢体能够被机器替代,身体机能大幅提升。
编者按:本文来自微信公众号“初心资本ChuxinCapital”(ID:Chuxin-Capital),作者许华轩、冯甜。36氪经授权转载。
两部影片、两个故事,尽管背景设定不尽一样,其中诚意满满的科技感都让观众浮想联翩。相比俗气的科幻电影中机器人反叛人类的设定,这种人类占主导的世界观显然更符合观众的口味。今天,我们也撇开能够取代人类的全自动机器人不谈,谈谈更加“和谐”的人机结合技术:外骨骼机器人。
本篇报告将逐一探讨以下内容:
简介|外骨骼机器人发展与演进
市场|外骨骼机器人潜在市场规模
产品|外骨骼机器人产品体系
技术|外骨骼机器人技术路径
分析|国内外外骨骼机器人市场盘点
观点|外骨骼机器人的未来之路
本篇报告约1.4万字,大家可以按照标题直接跳到感兴趣的部分阅读。

01 简介 | 外骨骼机器人发展与演进
要聊外骨骼机器人,首先要了解什么是外骨骼机器人。直观上理解,外骨骼机器人就是“穿在身上“的机器人——比起《阿丽塔》世界观里的改造人,还是《流浪地球》中的救援队更接近现在外骨骼机器人应有的形态。改造人能够将身体上多个器官改装成机械从而改善物理机能、提高身体素质;救援队在外骨骼的帮助下变得力大无穷,足以抵抗各种严苛的外界环境。尽管现实生活中的外骨骼机器人没有这么强力的增幅效果,其作用也不外乎此:增强力量、提供助力。
早期的外骨骼机器人以液压驱动为主导,主要应用于军事领域
外骨骼机器人出现伊始,是为了满足军方训练士兵的需要。1965年,在美国国防部的支持下,通用电气公司与康奈尔大学合作研发的可穿戴式机械样机Hardiman,开了助力型外骨骼机器人样机研发的先河。Hardiman采用电机驱动方式,可举起341kg的重物,但受技术的限制,产品体积和重量过大,无法进行实际应用,外骨骼机器人研究因此销声匿迹。随后的几十年时间里,随着传感技术、材料技术和控制技术的高速发展,至二十世纪末,外骨骼机器人再次进入蓬勃发展阶段,美国、日本、俄罗斯等国均针对外骨骼机器人展开大量研究工作。
2000年,美国国防高级研究计划局(DARPA)出资五千万美元用于资助对能够“增强人体机能的外骨骼”项目(EHPA)的研究和开发,旨在提高士兵的行军能力。美国加州大学伯克利分校在该项目的资助下,研发出BLEEX样机。该套装置中共有40多个传感器,通过力传感器的信息反求人机间作用力从而获得穿戴者运动意图;驱动方式在六个关节上采用液压驱动器驱动。BLEEX由于存在结构复杂、能耗大、使用时间长不舒服等缺陷,未能获得DARPA第二阶段的资助,但其负责人Kazerooni教授基于在BLEEX研究中的成果开发了更加轻便简洁实用的HULC,并成立伯克利仿生公司,进行市场化运作。HULC采用液压驱动器进行驱动,使用两块3.6kg的锂电池作为动力源,产品净重24kg,其负重能力是BLEEX的三倍,达91kg,可供使用者5km/h的速度连续行走3小时。而后HULC被著名的武器承包商洛克希德马丁公司(LMT)收购。
Sarcos是参加EHPA项目的另一家公司,于2007年被雷神公司(Raytheon)收购,研发外骨骼机器人XOS,而后进化到XOS 2代。产品采用高压液压系统驱动,但并未集成泵源和动力系统,而是将液压油箱和液压泵源独立设置在机器人外部。
从上面几款产品的发展历程可以看到,美国外骨骼机器人的研发是以军事应用为背景,在政府大力的资助下开展的。而在日本,研究方向则与美国迥异,主要从民事和医疗领域入手,研究外骨骼机器人在助残、护理、劳动等领域的应用。
HAL系列引导了外骨骼机器人的民用化及商业化
日本筑波大学Yoshiyuki Sankai博士领导的科研团队开发了HAL系列外骨骼机器人,随后团队与Cyberdyne公司合作,于2008年将HAL投入商业生产。HAL目前已发展到第五代,HAL-5通过肌电传感器采集人体运动信息,通过电机实现驱动。产品重约15kg,动力源小巧、使用时间长,主要应用于医疗康复、残疾人助力、灾害现场救援等多种用途。
以ReWalk为代表的公司尝试医疗领域的机会,且获得资本市场认可。
国外其他商业化产品也主打医疗助残领域。如以色列的ReWalk产品,其发明者阿密特·戈夫尔(Amit Goffer)本人就是一个瘫痪患者,Rewalk的目标就是让腰部以下瘫痪者重获行动能力。ReWalk机器人由电机驱动的腿部结构、人体姿态感应装置和安装处理器与电源的背包组成,此外需要一副拐杖帮助维持身体平衡。同期还有美国的Ekso Bionics公司。
上述三家公司都在外骨骼机器人领域商业化上取得了一定的成绩,分别于2014年在东京和美国上市。
我国外骨骼机器人发展处在初步阶段
我国外骨骼机器人的研究起步较晚,同时因资助力度小,高校层面的研究较为落后,样机实物也略显粗糙。商业化层面,研发公司多以商业化变现能力强的医疗或工业领域入手开发外骨骼机器人产品。主要的公司包括有大艾机器人、迈步机器人、傅里叶、布法罗机器人、英汉思机器人、铁甲钢拳、傲鲨智能等。
02 市场|外骨骼机器人潜在市场规模
目前外骨骼机器人市场上的各家公司主要将医疗康复、助行和工业作为他们的主战场,在未来,会向民用领域发展和延伸。基于此,我们将整个市场规模按照细分赛道进行拆分来分析。
医疗康复领域
就医疗康复领域来看,中国康复型外骨骼机器人(重型偏瘫、中风等患者使用)的市场保有量约9000台,市场规模约在几十亿。但渗透率及增幅是限制这个领域发展的重要因素。
根据中国卫生统计年鉴,2017年我国仅有康复专科医院552家;根据国家统计局的数据显示,2017年全国共有综合医院11701家,据公开资料显示,2017年我国综合医院中设立康复科的医院比例在30%-35%,据此中国有康复科的综合医院约3500-4000家。故我国对康复型外骨骼机器人有需求的康复医院总数约为4000-4500家。因此,以一家医院平均购买1-2台设备计算,中国康复型外骨骼机器人的存量需求不超过9000台,行业均价在几十万(从30万到300万不等),由于医院购买力、基础设施、产品形态、医疗认证、产能等综合因素的影响,康复性外骨骼机器人的市场渗透率极低,且需求量基本在1台,我们判断短期内仍是一个小规模市场。
此外,对于普通的社区康复中心,因其体量小,服务条件限制,其康复手段以传统的按摩、理疗为主且主治疾病为轻度的运动损伤,我们判断其短期内不具备购买大型康复设备的能力和需求,暂未进行统计。

(数据来源:国家统计局)
助行领域
助行型外骨骼机器人的潜在市场需求大约为1500万台,市场规模约为1200亿元。较康复市场而言,助行型外骨骼机器人的市场规模更有前景,且2C是个增量市场,市场天花板足够高,市场空间足够大。
助行型外骨骼机器人的目标在于为使用者在日常生活中提供持续的助力,我们从C端市场需求出发进行预估。细分来看,我们将有助行需要的人群可分为三类:肢体残疾人士、行走不便的老年人和无行走障碍的人群(如登山爱好者等),其对应的产品市场价格范围分别在10万到30万人民币(均价15万人民币)、数万元人民币(均价3万人民币)、数千到数万人民币不等(均价8千人民币)。
肢体残疾人士根据第六次全国人口普查显示,我国残疾人口数量达8524万人,肢体残疾2472万人。我们假设重度肢体残疾与轻度肢体残疾人数比例分别为30%和70%。对于重度肢体残疾人群来说,助行设备受制于体积、续航、价格等因素,实际作用不大,因此该类人群的购买意愿不强,预计潜在需求量约为7000台。对于轻度肢体残疾人群来说,其需求与老年人接近,参考助听器在听障人士中的渗透率:在我国约为5%,预计未来几年内助行外骨骼的渗透率可达1%,潜在需求量约为17万台。
老年人群根据国家统计局数据显示,2017年我国老年人口数量达1.58亿人,预计到2020年我国老年人口能够达到1.8亿。与轻度肢体残疾人群类似,预计渗透率为1%,潜在需求为158万台。
无行走障碍人群COA2016年调研结果显示,中国约有1.3亿人开展徒步等各类泛户外运动,其中约6000万人进行登山等运动。渗透率参考其他户外产品:2017年帐篷在户外运动爱好者中的渗透率高达20%。乐观估计外骨骼机器人渗透率达10%的情况下,潜在需求约为1300万台,但我们认为这部分需求的市场尚未到来。
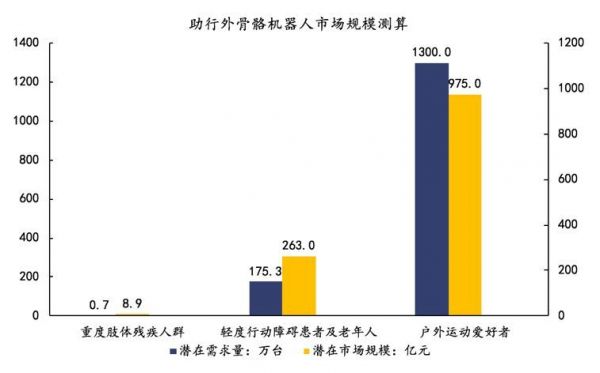
(数据来源:国家统计局,COA)
工业领域
外骨骼机器人在工业领域可广泛应用于物流分拣、工厂生产、建筑搬运、石油勘探等多种场景,中国约有3400万从事重体力劳动的工人,潜在市场规模约为200至300亿元。
首先,根据《2016年中国自动化市场白皮书》,2015年中国的自动化及工业控制市场规模为1390亿元,预计2017年将达到1593亿元,CAGR仅为7%。我们可以看到中国的自动化进程已经进入到平缓增长的阶段。这意味着,在现有技术的支持下,工业自动化已经发展到一个平台期,很多精细化的、非标准化的操作或野外工作场景下,自动化机器难以胜任,人力仍然是工业生产中不可或缺的生产力来源。
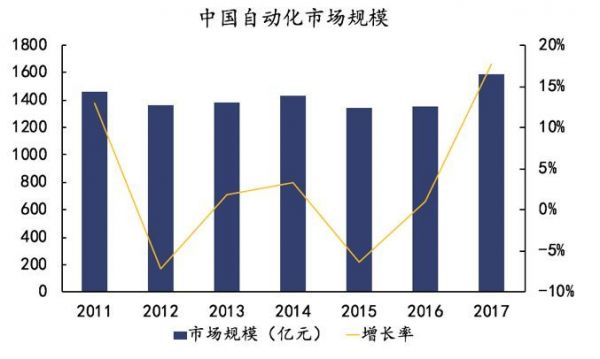 (数据来源:《2016年中国自动化市场白皮书》)
(数据来源:《2016年中国自动化市场白皮书》)同时我们还能看到中国工业领域的实际劳动力供给形势严峻。结合国家统计局披露的数据和六普数据,我们估算出近年来在采矿业、工业制造业、建筑业、装卸搬运业与仓储业等重体力劳动行业的从业人员总数变化。从2013年起,这几大领域的从业人员持续减少,2017年总的从业人员数量约3400万。
 (数据来源:国家统计局,第六次人口普查)
(数据来源:国家统计局,第六次人口普查)伴随从业人数的下降,我们还能发现从业群体高龄化的现象。以农民工群体为例,41岁以上农民工占比从2008年的30%上升至2015年的45%。这部分工人在体能上难以适配高速运转的生产环境和需求,长期重复劳动造成的职业病进一步降低了工人的生产效率。这一部分对能够增强工人力量、减轻工人负担的外骨骼机器人的需求潜力巨大。按每百人配备一台外骨骼、产品均价六至十万人民币计,市场规模约为200到300亿人民币。
03 产品 | 外骨骼机器人产品体系
根据提供力量支持的器官不同,目前主流的外骨骼机器人从产品形态上看主要包括三类:上肢外骨骼机器人、下肢外骨骼机器人和腰部外骨骼机器人。在此基础上,还出现了更加“经济实惠”的单关节外骨骼机器人、技术路径全然一新的软体外骨骼机器人等。不同形态的外骨骼应用于不同的场景,比如医疗领域、工业领域、民用领域等。
下肢外骨骼机器人
下肢外骨骼机器人从形态上可分为两种类型。一种类型是全覆盖型:包括位于腰背部的主机箱,完全包裹两条腿外侧的金属结构,以及足底金属结构,部分产品会有配套的拐杖以实现控制和支撑功能,部分产品会辅以支架或吊绳。主机箱中有系统运行平台、电源等硬件模块,其大小、重量因每个产品而异。在下肢结构上一般会将髋关节、膝关节和踝关节设计为可动关节,通常将可自由活动的关节数量称为“自由度”,自由度的高低与机器人模拟人形态的能力息息相关。另一种类型是半覆盖型:除主机箱外,下肢仅有腿部固定结构、关节及连接结构,产品设计更加紧凑、轻质。一般来说,产品越重,适用的人群对机器的需求越高,机器为人提供的支撑越大,如瘫痪患者、偏瘫患者等;轻质产品的使用场景也相对更为灵活,适用人群具备一定行走能力。
上肢外骨骼机器人
上肢外骨骼机器人和半覆盖型的下肢产品的形态很相似,仅是将固定在下肢的结构转移到了上肢,从结构上看也主要通过有自由度的关节在辅助人体的活动。
腰部外骨骼机器人
腰部外骨骼机器人形态上类似曾经红极一时的“背背佳”,通过织物将产品固定在背后,产品的主体即为被在身上的主机箱,各种功能模块都布置在机箱内部。主要用于频繁弯腰搬运的场景,如物流、建筑工地等。
软体外骨骼机器人
目前市场上的软体外骨骼机器人其实也属于下肢外骨骼机器人的一种,从使用场景来说与轻质的金属结构外骨骼机器人也有所重合,但其形态和技术路径和金属结构的下肢外骨骼全然不同。主机箱仍然存在,但结构更为小巧,下肢部分通过纺织物固定在人体上,通过绳索而非关节结构提供助力。
04 技术 | 外骨骼机器人技术路径
外骨骼机器人三大核心系统:传感系统、控制系统、驱动系统
传感系统收集运动相关的信号传递给控制系统,控制系统处理传递来的信号转化为运动的指令,再传递到驱动系统,最终由驱动系统带动外骨骼的行动。在此过程中,每个环节都存在着相应的技术难点,影响外骨骼机器人的形态、反应速度、随动能力、舒适程度等性能特征。
传感系统通过分布在外骨骼不同位置的传感器收集使用者的步态信息或运动意图,通过获取这些数据,以一定形式传送给控制系统。从收集的信息类型来分,可分为物理量传感器和生物量传感器。物理量传感器可采集位置、角度、压力、扭矩等物理信息,从而判断使用者的步态周期,力反馈方法具有难以克服的滞后性,在进行一些动作时容易有阻碍感;生物量传感器可采集由人体中枢神经控制的肌电信号,相对物理量传感器数据有一定超前性,但由于关节力矩和肌电信号不能找到一个一一对应的关系,且传感器要贴在人体表面,容易脱落、异位,测量结果易受干扰。
控制系统是外骨骼机器人的中央枢纽,通过对传感系统反馈的数据进行分析并规划步态模式,对驱动系统实现闭环控制,其中涉及到传感器融合算法、控制算法等一系列软件模块。一般来说控制器集中位于背部,实施全局控制,包括系统主机、信号采集板、电机驱动板、电源管理等模块。但随着外骨骼自由度的增加、模型算法的复杂化,也可采用分布式控制,减轻中央控制系统的负担,提高系统响应速度。
驱动系统位于机器运行的末端,负责带动机械结构,执行控制系统传递来的具体任务。根据驱动形式的不同,主要分为三种驱动方式:电机驱动、气压驱动、液压驱动。三种方式各有优劣,其中以电机驱动在实际中应用较为广泛。
三种驱动方式的原理及应用前景
电机驱动在外骨骼机器人上使用电驱动方式一般有2种方案。一种方案是在旋转关节上直接安装盘式电动机,利用电动机转子的旋转带动关节旋转。这种安装方式结构简单,易于维护拆卸。但是采用这种方案,将使得外骨骼机器人的旋转关节十分笨重,加之安装空间有限,往往会由于电机尺寸限制而达不到到理想的输出驱动力,因此这种方案大多用于实验室原理样机上用以开展相关实验研究。另一种方案就是利用电动推杆驱动,在电动推杆两端用连接耳与外骨骼连接,将电动机的旋转运动转化为推杆的直线运动,推动转动关节转动。电动推杆一般由电动机和丝杠组成,通常采用的是直流电动机,其原理是电动机的转动带动丝杠的螺母转动,然后螺母利用螺旋副的原理推动丝杠做直线运动,从而使丝杠带动外骨骼机器人的大腿、小腿、足部分别绕髋 关节、膝关节和踝关节做旋转运动,实现髋关节、膝关节和踝关节在矢状面内的屈伸运动。日本筑波大学的HAL、美国Yobotics公司的Roboknee、中科院常州先进制造研究所在2014年研制的外骨骼机器人ExOP—采用的都是电机驱动方式。
气压驱动方式与液压驱动方式的原理类似。以气体为介质,通过一系列控制阀的控制,最终使气体推动气缸的活塞做直线运动。通过将气缸分别连接在外骨骼机器人的大腿、小腿和足部连接耳,将气缸活塞的伸缩运动转化为各关节的转动以实现外骨骼机器人的行走功能。气压驱动方式在外骨骼机器人上应用较少,意大利研制的PAGO机器人、日本神奈川大学的 weamble Power Assist Suit采用的是气压驱动方式。
液压驱动是以流体(液压油)为工作介质进行能量传递的一种方式,包括液体介质、能源装置、控制调节装置、执行装置、辅助装置等5个部分。其工作原理为 :液压泵吸油口从油箱中吸油,油液在液压泵中由于容腔容积的变化而被加压,再从排油口排出高压油,通过一系列压力控制阀、流量控制阀以及方向控制阀的控制,使油液以理想的状态到达液压缸(执行元件),推动液压缸的活塞做直线运动,最终转化成大腿、小腿、足部在矢状面内绕髋部、膝部和踝部的旋转运动。同等功率的设备,液压传动装置的体积更小,质量更轻,结构紧凑,即液压驱动方式的推重比较大。液压装置通过不同的组合可以实现不同的动作,而且由于液压油具有不可压缩性,其动态响应更快。液压驱动技术已经应用在国外很多成熟的外骨骼机器人上,而国内由于外骨骼机器人的研究起步较晚,液压驱动技术应用得比较少。美国的BLEEx外骨骼机器人、洛克希德·马丁公司的全身外骨骼机器人HULC、美国雷神公司的XOS系列外骨骼机器人采用的是液压驱动。
三种驱动方式的技术优劣势

电机驱动采用电动机驱动方式的优点是电动机驱动的技术成熟、控制模式相对简单、响应快、控制精度易于保证、使用维护方便、信号检测和传递处理方便、驱动效率高、对环境污染小、成本较低。但是,从外骨骼机器人的应用角度出发,要求驱动系统的体积小 且质量轻,在外骨骼机器人负重的情况下,如果要实现较大的动力驱动,则选取的电动机尺寸也会偏大,不利于整体的轻量化,而且也会影响机构的灵活性。
气压驱动采用气压驱动是一种较为成熟的驱动方式,其优点是:(1)气压驱动工作压力低、使用安全、加速很快,制造精度强度要求比液压元件低且维护简单。(2)气压传动的介质是取之不尽的空气,流动损失小,可集中供气,废气排放处理方便、无污染、成本低。(3)气压驱动方式与液压驱动原理类似,其控制方法可以参考更成熟的液压驱动。其缺点是:(1)气动装置的信号反馈速度较慢。(2)空气具有可压缩的特点,导致气动执行元件的动作稳定性差,速度及位置控制不够精确。(3)压缩空气需要除水,泵驱动时噪声十分大,会造成噪声污染。(4)气压驱动方式的推力偏小,不易实现精确的中间位置调节,通常是在2个极限位置使用。总体来看,电驱动技术以及液压驱动技术由于 相对成熟,大多数外骨骼机器人都采用这2种驱动方式。对于用在康复等用途的外骨骼机器人,由于其负载作用力较小,大多采用的是电驱动方式;对于用在战场行军和抗震救灾等用途的外骨骼机器人,由于其负载较大,大多采用的是液压驱动方式。
液压驱动采用液压驱动方式的优点是:(1)在输出同样大小功率时,液压传动方式的结构紧凑、体积小、质量轻。(2)液压传动方式工作比较平稳,易于实现系统整体的柔顺性。(3)液压油能润滑液压部件,使得液液压油的可压缩性和存在泄漏等因素,液压传动不能保证严格精确的传动比。其缺点在于:(1)液压传动中,能量损失较多,使得系统效率低。(2)液压传动对油液温度的变化比较敏感(主要是黏性),系统的性能随温度的变化较大,不宜在温度较低或者较高的地方工作。(3)为减少泄漏,液压元件需要有较高的加工精度,使得加工成本较高。(4)液压传动一旦出现故障不易找出故障源。
外骨骼机器人是项复杂的综合性任务,硬件及算法上仍然未取得突破
上述三大系统互相作用,以实现整个机器人的协调运动,其中涉及传感技术、机械控制、人体力学等多学科知识,是一项复杂的综合性任务。现阶段,技术上仍存在许多难以突破的瓶颈,从而限制了产品的易用性,如复杂运动下响应速度不足、下肢机器人重心不稳、多自由度下协调控制困难等。具体来说,难点主要集中在控制系统内,包括:多传感器融合技术、意图识别、重心调节、关节自由度和建模复杂程度的平衡等,这些是软件层面的难点。此外,在驱动系统中,由于材料学科发展缓慢,电机的性能受到制约,进而限制了机器人的可应用场景,这是硬件层面的难点。
发展至今,外骨骼机器人在技术上不断进步,功能上不断迭代。无论是学术界还是外骨骼机器人公司,都在全力进行软件算法的研发,欲在上述难点上实现技术的进一步突破,建立起技术壁垒和核心优势。具体内容将在第五部分予以详述。
05 分析 | 国内外外骨骼研发企业盘点
医疗领域
头部医疗外骨骼机器人上市表现远低于预期,部分公司尝试进入工业领域
医疗领域的外骨骼机器人公司,我们从国外的领军者们说起。首先,我们介绍下上文提到过的国外三家已上市的外骨骼机器人公司:以色列的Rewalk、日本的Cyberdyne和美国的Ekso Bionics。
Rewalk
公司简介:Rewalk是外骨骼机器人商业化的领军者,公司最早成立于2001年,于2011年获得美国FDA(食品药监局)资质认证,并于2014年登陆美国纳斯达克上市(NASDAQ: RWLK)。
产品形态:Rewalk研发生产的外骨骼机器人包括下肢外骨骼和一副配套拐杖,外骨骼本身利用倾斜传感技术,通过检测重心变化带动患者行走。产品本身不具备重心调节能力,需要使用拐杖来平衡稳定上身。总体来看,产品技术含量不算高,传感器也比较简单,产品的售价为7.7万美金。应用场景:产品主要面向失去行走能力的残疾人,旨在帮助他们会服行走能力和正常的生活自理能力。
财务表现:作为外骨骼机器人领域的鼻祖,Rewalk为后来者奠定了产品研发和商业化的方向。但近几年由于其糟糕的财务表现使得给整个医疗外骨骼机器人市场低迷。2018年,ReWalk实现营收654.5万美元,净利润-2167.6万美元,全年全球出货量共85台,远低于2017年的107台。2014年上市后,股价历史最高为$43.71,市值达30.8亿美元;而后一跌再跌,当前公司股价仅为$0.26,市值1846.1万美元。
Esko Bionics
公司简介:Ekso Bionics成立于2005年,主要从事医疗外骨骼机器人的研发,于2012年获得美国FDA和欧洲CE认证,同样于2014年登陆纳斯达克上市(NASDAQ: EKSO)。
产品形态:在医疗康复领域,公司主推产品EksoGT。相较Rewalk的产品,其形态没有太大差异,但没有配套的拐杖,具备一定自平衡能力。产品售价10万美金。2015年起,公司向工业领域拓展业务,推出产品EksoVest。产品本身技术含量较低,采用弹簧为主的机械式助力,主要为工人提供力量增强,减少工伤的可能性。
应用场景:EksoGT产品主要面向神经性损伤患者,可实现不同损伤水平的康复训练;EksoVest目前应用在工业生产中,服务的客户主要为整车厂,如福特。
财务表现:由于医疗外骨骼机器人的缓慢发展,2016年,公司开始向工业领域进行拓展,且增幅逐渐增大。从整体财务表现来看,2018年Ekso Bionics实现营收1133.2万美元,净利润-2699.2万美元。2014年上市后,公司股价历史最高为$10.08,市值达6.4亿美元;当前公司股价为$2.36,市值1.5亿美元。
Cyberdyne
公司简介:Cyberdyne成立于2004年,主要从事医疗外骨骼机器人研发,由日本筑波大学教授Yoshiyuki Sankai创立;2008年正式上市HAL系列产品;2014年,公司在东京证券交易所上市。2013年通过欧洲CE认证。
产品形态:相比ReWalk,Cyberdyne开发的HAL系统的适用范围更广泛。不但有面向截瘫患者的医用下肢外骨骼系统,还有腰部助力外骨骼、单关节外骨骼等。产品的核心技术在于基于皮肤表面生物电信号的意图识别算法。由于产品价格昂贵,公司以租赁的方式将产品推向B端市场。
应用场景:不同形态的产品应用于不同的场景。已获得CE认证的医用产品用于行走障碍患者的康复训练,未获得认证的下肢产品用于慢性病恢复和正常人助力,单关节外骨骼用于力量训练,腰部外骨骼用于助力。
财务表现:从整体财务表现来看,2018年财年(至2018年3月31日)Cyberdyne实现营收17.28亿日元,净利润-6.73亿日元。纵观历史数据,公司的营收稳步增加,净利润与零点的差距也在缩小。但在资本市场上同样表现不好,2014年上市后,公司股价历史最高为$26,当前公司股价已降至$5.86。
就国内市场而言,近年涌现出多个外骨骼机器人初创公司,大多数以医疗领域作为切入点。根据不同公司的产品形态和细分市场,我们将医疗外骨骼机器人分为四种类型:重型康复、轻型康复、重型助行、轻型助行。其中重型康复产品旨在为中至重度行走障碍、乃至失去行走能力的患者提供康复训练;重型助行产品旨在为这类人群提供持续的、日常使用的助力,这两类产品的产品形态类似Rewalk、EksoGT,是大型的外骨骼机器人;轻型康复产品指的是针对单关节损伤进行康复训练的小型外骨骼机器人,不具备辅助行走功能;轻型助行产品是针对轻度行走障碍人群设计的软体外骨骼机器人产品,与重型产品的技术路径存在较大的差异。如下我们分别选取具有代表性的部医疗外骨骼机器人公司进行研究。
大艾机器人
公司简介:北京大艾机器人科技有限公司专注运动功能障碍康复产业领域是高端医疗机器人创新企业。公司为医疗机构和脊髓损伤、脑损伤患者提供各类专业康复外骨骼机器人装备,促进下肢运动功能障碍患者高效康复。产品外骨骼机器人处于国内医疗康复机器人领域领先地位,是实施《北京市医疗器快速审评审批办法》后批准的首个北京市创新医疗器械产品,获得中国首个外骨骼机器人CFDA注册证。
产品形态:公司目前研发两款产品:艾动和艾康。产品形态与国外Rewalk产品类似,包括一套下肢外骨骼和一副支撑拐杖或固定支架。其中下肢产品上具备四个自由度,在每个关节处都装有传感器、驱动器和控制器,为行走提供力量和控制;腰部和腿部设有固定带,并在机器人底靴固定患者脚步以实现稳定与支撑,背后的电脑版设定了患者的步态、速度等参数。产品重达20kg,续航时间8小时,售价在200-300万。
核心技术 :硬件层面,在胯骨两侧和膝盖两侧共配备四个电机,采用电机驱动的方式提供力量和控制。在软件层面,采用自主研发的智能康复数字化体系,配合多传感器实现意图识别、步态规划、速度调节等功能,并在患者康复进程中实时进行再评估、再诊断如此循环往复地为不同患者量身制定整体、全面的康复计划。产品暂无重心调节功能,需要借助拐杖(艾动)或移动台架(艾康)支撑。
应用场景:产品主要针对严重偏瘫、脊髓损伤、脑损伤、脑瘫等行动障碍患者。其中艾康配有移动台架,可供早期康复患者使用,在康复训练过程中对患者腰部以上身体形成支撑、稳定骨盆;艾动配有拐杖,其使用场景更加自由,能够模拟人体自然行走步态,适用于中期康复及术后康复。
布法罗机器人
公司简介:布法罗机器人是一家外骨骼机器人产品供应商和系统解决方案提供商。公司依托电子科技大学机器人研究中心成立,业务涉及康复医疗外骨骼机器人自主研发、规模生产和市场销售。公司研发的产品曾在第九届残运会上让截肢患者站立行走点燃主火炬。
产品形态:产品由一套穿戴装备和一副拐杖组成,形态与大艾的产品类似。产品重达20kg,可续航2小时,产品价格在30万。
核心技术:硬件层面采用电机驱动方式,整体来看技术路径与大艾类似,差别体现在自主研发的软件算法,在传感信号处理和步态规划上稍有不同。
应用场景:布法罗机器人产品专为丧失行走能力的患者设计,适用于T9-T12脊椎损伤人群,旨在助其恢复行走能力。但目前来看,产品主要通过长期短时的行走训练减少瘫痪患者肌肉萎缩、褥疮等并发症的发生,更多是应用于医院辅助治疗,无法恢复患者自由行走的能力。
迈步机器人
公司简介:迈步机器人是一家医疗康复机器人研发商,专注于研发用于中风患者步态康复的下肢外骨骼机器人以及其他医疗康复机器人。主要产品包括康复机器人、柔性驱动器、医疗机器人、外骨骼机器人康复设备、下肢康复外骨骼机器人等。
产品形态:产品无配套拐杖,配备多传感器,在双侧的髋、膝、踝关节共具有6自由度,主要用于脑中风患者的术后康复训练。产品自重约12kg,续航能力4小时左右。现阶段产品售价30-50万。
核心技术:硬件层面,产品具有6自由度,对人体关节的模拟程度较高;同时采用自主研发的柔性驱动器,提高力控制的稳定性和精度,相较传统的刚性驱动方式,对人体提供更有效的缓冲和保护,也更加节能;相应地配合自主研发的多关节运动控制算法,实现更自然的人机交互。因患者具备一定行走能力,产品不需外力辅助支撑,具备一定重心调节能力。
应用场景:产品专门应用于辅助脑卒中患者步态康复训练,使用场景相对局限。
司羿智能
公司简介:上海司羿智能科技有限公司是一家从事医疗康复机器人等高科技产品类研发、生产、销售公司,目前已开发出两款康复机器人产品:康复机器人手套、下肢助力软性外骨骼,并已申请国家专利十余个。
产品形态:下肢软体外骨骼产品没有刚性骨架,通过纺织物固定,主要通过在患者肌腱处提供运动补偿,来提高使用者的行走能力。产品面向的人群主要是具备行走能力,但行走不便的中风患者、老年人等。产品重量不足3kg,价格数万元。
核心技术:产品采取“电机+线驱”的方式模拟人体行走时肌肉收缩的过程,硬件层面上没有了自由度的限制,产品更轻、背后的电脑版更加小巧;在软件算法上,通过肌肉提供助力的方式也与在关节提供助力的外骨骼解决方案全然不同。
应用场景:产品面向偏瘫导致的行走障碍患者、行动不便的老年人以及户外运动爱好者。因产品足够轻巧,不会对人体正常运动造成阻碍,可广泛应用于日常使用的多种场景,能够在一定程度上减轻患者行走不便的问题。
总体来看,大多数公司的产品延续了Rewalk等国外公司的形态设计,在产品重量、重心控制等技术难题上仍缺少有效的解决方案,尤其是面向重度行走困难患者的产品,现阶段只能实现辅助治疗功能,无法全然替代传统康复手段,也无法让患者摆脱轮椅的束缚以实现助行功能。司羿智能则在产品形态及目标市场的选取上和传统方案有所差异,面向轻度行走障碍人群,现有技术能够更好地满足这类人群的需求,相对而言市场规模也更大。此外,除大艾一家取得CFDA((中国食品药监局)二类医疗器械资质外,其余公司都未获得相关资质,产品还不能在中国市场投放。因此,无论从技术进展、产品形态还是资质认证上来看,大部分现有的外骨骼机器人产品都很难满足医疗领域的康复需求和助行需求。
工业领域
我们已经可以看到,Ekso Bionics从2016年就已开始工业领域,且营收占比逐年增大。在国内,我们选取了具有代表性的两家从事从业领域外骨骼机器人的公司进行研究:傲鲨智能和铁甲钢拳。
傲鲨智能
公司简介:傲鲨智能是一家外骨骼机器人研发商,成立于2018年4月。旗下正在研发的增强型外骨骼机器人产品可应用于工业、民用、军事等领域。
产品形态:公司目前在同时研发上肢和下肢外骨骼机器人。其中上肢外骨骼机器人“MAPS脉”用有4个自由度,自重约10kg,负重范围5-10kg,采用伺服电机驱动,续航时间达3-4小时,可应用于汽车工业领域,提高工人效率。下肢外骨骼机器人“HEMS尉”。具备6主动自由度和6被动自由度,助力范围预计在30-60kg,用于力量增强和负重训练,目前正在与海军军医大学合作研发。
核心技术:产品在软硬件上都具备相应的技术优势。硬件上,采用自主研发的运动控制卡和配套电机驱动单元;软件上,配套自主研发的意图识别算法。此外,产品具备数据收集和学习能力,未来可将数据上传到云端,为企业提供数据分析服务。
应用领域:上肢产品可应用于工业领域,为汽车、飞机、船舶制造头顶作业的工人提供助力,未来可切入物流领域、消防领域等;下肢产品可应用于军事领域,适用于力量增强等需求。
铁甲钢拳
公司简介:铁甲钢拳是一家以科技研发为推动力的公司,成立于2017年。主营业务为柔性机械外骨骼系统。
产品形态:公司主要研发的商业化产品是一款腰部助力外骨骼机器人CEXO-W02,主要用于在使用者搬运重物时为其提供助力。产品采用自助研发的气动驱动方式和软件算法,自重5.5kg,最大提供30kg的助力。产品售价2-4万元,目前主要应用于物流领域,已与京东物流等公司形成合作。
核心技术:产品在硬件结构上采用钛合金和航空铝等轻量材料,自重很小;软件方面,配套开发了适用于不同个体的自适应算法。
应用领域:目前产品适用于为一定范围内的搬运操作提供助力,如物流分拣。未来若推出无线版本产品,应用范围则更加广阔,如野外作业、建筑工地等。
相比国外工业领域的外骨骼产品普遍采用弹簧为主的机械助力,国内的两家公司做的都是有动力版的产品,区别在于动力源的选取,我们更看好电机驱动模式。
06 观点 | 外骨骼机器人的未来之路
医疗领域的重型外骨骼机器人商业化前景不明朗。重型外骨骼机器人面世的初衷就是“让无法行走的人重获行走能力”。不可否认,这是一件很有社会价值的事情,但产品价格昂贵、外形笨重、技术不成熟等问题都限制了产品日常使用的可能性。此外,对于康复市场,2B的逻辑意味着产品销售渠道以医院为核心,而我国康复医院总量和增长还相对有限,加之CFDA认证的门槛和周期,医疗外骨骼机器人市场将是一个发展缓慢且增长有限的市场。
软体助行外骨骼机器人有望成为消费级产品。对于轻度行走不便的人群(如偏瘫患者、脑瘫患者、老年人)来说,有比较刚性的恢复正常行走能力的需求;此外,对标平衡车等产品,年轻的户外运动发烧友愿意尝试此类新产品。这部分群体数量巨大,且是增量市场。这些人群对产品的需求是轻便灵活、价格低廉、能够适应日常使用的场景,而软体外骨骼机器人相较传统的金属外骨骼,更能满足这类需求。如果价格足够低,软体外骨骼机器人有望成为家庭消费级产品。
工业外骨骼机器人将比医疗外骨骼机器人更快发展。工业自动化及智能化是我们所认为在智能制造背景下一个相对终极的形态,这个终极形态的实现需要一定的周期和过渡,短期内工业领域很难实现全自动化,很多岗位仍需要人工操作,我们看到物流行业人员快速增长;工厂车间工人、建筑工地工人平均年龄增加,而年轻劳动力大多不愿意进入这些部门;野外勘探工作等仍需要人工作业完成。此外,劳力型工种引发的职业病逐年在提升,给企业的效能和成本带来很大挑战,工业外骨骼机器人可以为这些场景赋能,在一定程度上帮助企业实现效能的提升。从价格、技术、成本、应用场景上看,工业外骨骼机器人较医疗外骨骼机器人会先发展起来,但未来10-15年甚至更快,助力的外骨骼机器人也将会被自动化替代掉。
掌握核心硬件研发技术的公司能够率先打入民用市场。无论是从医疗领域切入还是从工业领域切入,未来向民用市场渗透是行业从业者的普遍共识。民用包括登山、徒步等个人使用场景和消防等公用事业使用场景,进入民用市场的一大前提是成本控制足够好,产品价格足够低廉。目前外骨骼机器人成本大头在进口的核心零部件,能够自主研发核心硬件的公司一方面可以压缩成本,另一方面掌握一定的定价权,从而形成成本优势,更具切入民用市场的竞争力。
总结
对于外骨骼机器人来说,强大的助力能力和康复功能是一个美好的愿景,但考虑到目前的技术瓶颈,从愿景走向现实还有不少距离。硬件层面,通用型伺服电机难以胜任机器人精细化的操作要求,进口电机又极大地提高了产品成本,限制了产品的商业化前景,市场内各个玩家自主研发核心电机驱动器的能力或成为公司的核心竞争力之一。软件层面,目前的意图识别算法、传感器融合算法、多自由度控制算法、重心调节算法都很难达到可应用的级别,也是产品推向市场的关键瓶颈所在。
从细分赛道来看,在医疗领域,我们认为短期内外骨骼产品在功能上无法与其应用场景的需求相匹配,且市场规模有限,因此不具备大规模商业化落地的能力。相较而言,面向C端用户的消费级外骨骼产品及工业领域外骨骼机器人的市场规模更具潜力,技术层面也更容易达到满足相应场景需求的标准。
也许未来“钢铁侠”能成现实,但就现阶段,我们建议各个玩家找准细分市场,在探索产品商业化的同时,做好软硬件的研发工作,积累技术优势,为外骨骼机器人的进化做好铺路。
如果你对“先进制造”也感兴趣,希望你与我们取得联系!联系方式为tian.feng@chuxincapital.com,期待你与我们一起探索先进制造的新可能。
References:
[1]李静,朱凌云,苟向锋.下肢外骨骼康复机器人及其关键技术研究[J].医疗卫生装备,2018,39(08):95-100.
[2]汪步云,汪志红,许德章.下肢外骨骼助力机器人本体结构设计与运动学分析[J].机械科学与技术,2018,37(04):553-559.
[3]范伯骞. 液压驱动下肢外骨骼机器人关键技术研究[D].浙江大学,2017.
[4]张增峰,陈炜,李浩,李坦东,侍才洪,李瑞欣,苏卫华,张西正.外骨骼机器人驱动方式的研究.医疗卫生装备,2016,37(8):126-129.
推荐阅读
初心行研 | 出海:一个绝对早期,5年级别的广阔赛道
初心行研|“少儿编程”不只是新奥数,而是新英语
初心行研|得到、知乎和喜马拉雅抢占风口,知识付费还有什么机会?(上)
初心行研|得到、知乎和喜马拉雅抢占风口,知识付费还有什么机会?(下)
初心行研|财富出海行业的困局与破局思考
初心发现|不一样的00后,我们读懂了吗?
初心行研|解密猪产业链:SaaS如何升级生猪养殖?
初心资本田江川:找比我看得更远的人,投资他,信任他
初心年会|追梦赤子心|初心资本2018年会主题演讲(实录)
初心年会|智能时代的教育变革


初心资本成立于 2015 年,是一家以科技升级及消费升级为中心积极布局新兴业态的早期基金,成立至今已经完成对 50 余家初创企业的投资,投资方向主要涵盖企业服务、科技升级、消费升级及泛娱乐等领域,其中包括二手车消费金融美利金融、互联网品质家装平台美窝、新型分布式数据库 PingCAP、视觉 PaaS 平台极视角、人工智能客服系统乐言、互联网互助保障社群水滴互助、工业机器人翼菲自动化、可多人实时协作的云端Office石墨、快消 B2B 平台乐来、移动手术平台名医主刀、移动交友平台一周cp、少儿编程平台西瓜创客、企业数据和金融工作系统服务商企名片等。
我们关注创业的初心,希望在陪伴创业者实现初心的过程中,等待下一个指数级增长公司、下一位新生代的商业领袖,在资本的驱动下,让我们的生活方式变得更美好。

相关推荐
外骨骼机器人离我们有多远
京东方离全球“面板之王”的桂冠有多远?
36氪首发 | 康复需求增长带动外骨骼机器人市场,「迈步机器人」获数千万元A轮融资
跟老师“隔空”讨论作业,全息技术颠覆教育离我们还有多远?
36氪首发|「迈宝智能」获千万级天使轮融资,外骨骼机器人如何服务于物流行业?
世界互联网大会现身智能质检一体机:工业智能化离我们还有多远
日产1亿只,造航母的都上了,我们离“口罩自由”还有多远?
小米、网易等巨头入局的教育硬件赛道,离爆发还有多远?
5G第一个风口,云游戏时代离我们有多远?
全球离“口罩自由”还有多远?一张图读懂
网址: 外骨骼机器人离我们有多远 http://www.xishuta.com/newsview2303.html
推荐科技快讯






- 1问界商标转让释放信号:赛力斯 95228
- 2人类唯一的出路:变成人工智能 21183
- 3报告:抖音海外版下载量突破1 21148
- 4移动办公如何高效?谷歌研究了 20339
- 5人类唯一的出路: 变成人工智 20338
- 62023年起,银行存取款迎来 10336
- 7五一来了,大数据杀熟又想来, 8596
- 8网传比亚迪一员工泄露华为机密 8505
- 9滴滴出行被投诉价格操纵,网约 8215
- 10顶风作案?金山WPS被指套娃 7230



