神奇,“水滴+铁珠”秒变机器人,移动速度可达2米/秒,还有清洁功能
编者按:本文来自微信公众号“学术头条”(ID:SciTouTiao),作者:库珀,36氪经授权发布。
把一吨水从一个地方输送到另一个地方,我们可以想出很多种方法,但如果我们需要精准移动几滴指定的小水珠呢?
这涉及到一门技艺叫做微流控输运,顾名思义,即一种微尺度下的流体输运方法。对流动液滴精准操控,在化学合成分析、药物筛选、细胞培养等领域用途广泛,对许多学科实验来讲不可或缺。
迄今为止,液相操作主要依靠具有特定形态或化学成分的固体表面来打破固、液、气三相接触线的不对称性,这种方法通常效率低,可控性有限,随着技术升级,近年来基于外界刺激(如光场、电场、热场)的智能液体操纵策略得到了广泛应用,但操作方法却不够简便。
还有没有更好的解决方案?很多科学团队都在不断探索。

图|移动水滴
(来源:Cell Reports Physical Science)
如今,来自香港城市大学和中国科学院的科研人员联合设计了一种新装置,他们使用一个具有极亲水表面的小铁珠,发明出了仿生磁驱动液体操作微机器人 Hydrobot,它可以在任意路径上驱动液滴移动,速度最高可达 2 米/秒(2000 体长/秒),随着小铁珠表面积的增加,Hydrobot 可以操纵更多的水。
这一策略还打破了空间限制,允许液滴沿三维 360° 圆移动,实现在任何坡度爬坡或下坡,未来其应用场景包括清洁难以到达的微环境或用来运送微物质。
图|Hydrobot 跟随外部磁铁控制,携带液滴移动或停止
(来源:Cell Reports Physical Science)
相关研究论文以“Bioinspired magnetically driven liquid manipulation as microrobot”为题,在线发表已经于 6 月 3 日发表在《细胞报告-物理科学》(Cell Reports Physical Science)杂志上。

(来源:Cell Reports Physical Science)
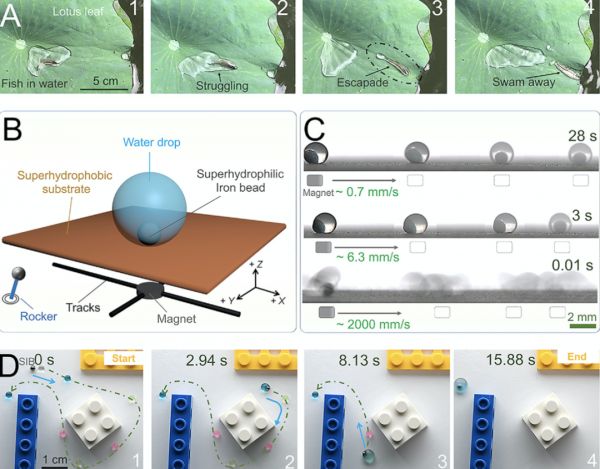
论文的第一作者、香港城市大学生物医学工程系的博士后研究员 Yifan Si 表示:“Hydrobot 的设计灵感来自在荷叶上蹦蹦跳跳的小鱼,鱼鳞具有高度的亲水性,能紧紧地粘附水滴,特别是在疏水表面。受这种自然现象启发,我们开发了 Hydrobot,其所涉及的材料很容易获取,能为软机器人的设计提供全新的思路。”
解决 3 个问题
业界对于移动小液滴这件事,一直面临着速度、体积和空间三方面的挑战。
首先,很难用较高的速度(每秒几米)精确操纵液体运动,更具挑战性的是,随机停止或移动液滴;同时,也难以在三维空间中实现液体操纵;此外,大多数的液体操纵研究都是基于空气中的超疏水表面,如何在其他基质或环境中扩展和实现液体操纵一直是业界关注的问题。
那么,如何攻克这些挑战?正如论文作者所说,灵感来自超亲水性鱼类能够将水从超疏水性荷叶中带走的自然现象。
通过利用内部超亲水铁珠(SIB)与液体之间的粘附力,在外加磁场的引导下,液滴在超疏水表面上移动速度可达 2 米/秒(接近每秒 2000 体长),并且可以根据需要随时停止。Hydrobot 可以像毫米级的软机器人一样在狭窄的空间内游走,完成清洁、物体输送和货物释放等复杂指令任务。
图|超疏水基底上的磁驱动液体操纵
(来源:Cell Reports Physical Science)
就像荷叶上的水滴一样,水滴能以近乎完美的球形出现在超高速疏水材料表面上,当 SIB 被放置在水滴中,会立即被水包围,形成一个新的整体,在可移动外磁体的驱动下,系统集成电路可以随磁体位置在二维 X-Y 平面上实现任意移动路线。
SIB 和水之间的高粘附力,可以提供足够的性能来保持水滴高速运动,研究人员在 4 个数量级的速度范围内测试了水滴特定的可操纵。理论上,这样的磁驱动操纵策略的速度可以慢到 0 毫米 / 秒,中速可实现 6.3mm/s 的液滴操纵,在更快的情况下,研究人员在 0.01 秒内完成 2 厘米的移动,平均速度为 2000 毫米 / 秒。在论文中,研究人员表示,这还并不是能达到的最高速度。
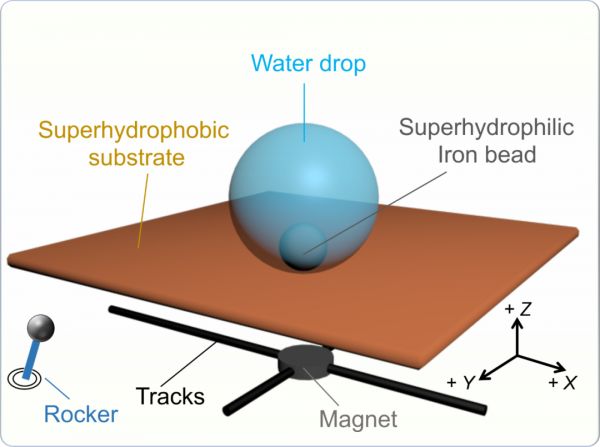
图|磁驱动机器人 Hydrobot 示意图
(来源:Cell Reports Physical Science)
此外,研究人员还介绍了一个平台,可以编程实现液滴在复杂狭窄空间中的快速准确移动,研究人员用水滴模拟了《吃豆人》游戏,实现了多个液滴的连续聚合,在磁铁的驱动下,液滴可以进行多次转向、移动或停止动作,6 个彩色微滴在 16 秒内聚集成一个大的微滴,并能保持良好的可控性和运动性。
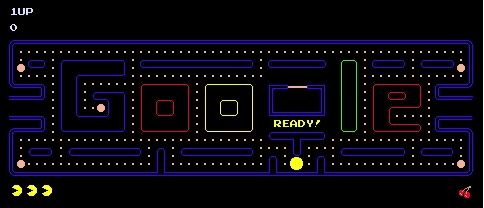
图|《吃豆人》游戏
相关机制和特性
在这种基于固液粘附力的液滴操纵策略中,固体表面积很关键。换言之,SIB 的表面积对液体操纵的程度有决定性影响。
实验结果发现,当液滴体积小于 50μl 时,两个 SIB 带着液滴均能实现 4 个量级(0.5~2000mm/s)的速度控制,当液滴体积大于 180μl 时,直径为 1mm 的 SIB 将失去操纵液滴的能力,直径为 2mm 的 SIB 在液体体积至 1000μl 时仍能在相对较快的速度范围(0.5-5mm/s)内实现水滴操纵,而同时使用几个 SIB,实验中实现了对 3mL 水滴的移动操作。
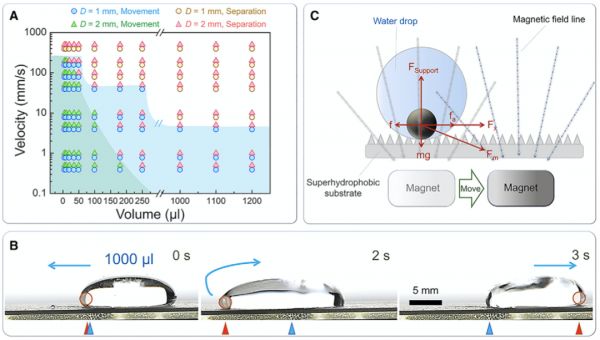
图|磁驱动液体操纵的机理
(来源:Cell Reports Physical Science)
那么,如何实现铁珠和液滴的分离呢?道理其实也很简单。当 SIB 与液滴之间的相对速度过大时,固液之间的粘性不足以使整个液滴获得足够的加速度,就可以使得 SIB 与液滴分离,液滴保持在原位(有时分离后液滴有一定的速度)。因此,快速加速是分离 SIB 铁珠和液滴以获得纯液滴的有效方法。
此外,研究人员还测试了 Hydrobot 在三维空间的液体操纵能力,这需要克服另一项挑战。
荷叶表面水滴可以自由滚动,具有表面自清洁特性,这称为荷叶效应;而玫瑰花瓣在超疏水状态下,微液滴可附着在其表面而不掉落,这称为花瓣效应。
超疏水表面的高运动性与高附着力之间存在着不可调和的矛盾,且由于重力的影响,液滴在三维超疏水表面的可控操纵一直很难实现。
Hydrobot 磁驱动液体操纵策略实现了高运动性和高附着力的统一,以及在三维空间(包括爬坡和 360° 旋转的圆形轨道)对水滴的可控操纵,经过多次旋转后,液滴仍然附着在磁铁表面。这一结果的根本原因是磁铁对 SIB 的吸引力,而不是单纯依靠固液粘附。通过这种机制,研究人员实现了对倒置超疏水玻片上水滴的可控操纵。

图|在三维空间中移动液滴,完成了液滴 “过山车” 运动
(来源:Cell Reports Physical Science)
值得关注的是,Hydrobot 磁驱动策略不仅仅局限于超疏水表面,还可以将液体操纵推广到所有类型的低阻环境中,比如在光滑的聚二甲基硅氧烷(PDMS)表面、平坦的超亲水性聚对苯二甲酸乙二酯(PET)衬底上等,这就解决了操控环境的诸多限制问题。
应用场景有哪些?
速度的绝对控制和空间限制的突破,使得磁驱动液体操纵策略在毫米级软机器人科学与工程领域具有良好的应用潜力。对于 Hydrobot 而言,水滴和内部 SIB 配合被视为一个整体。
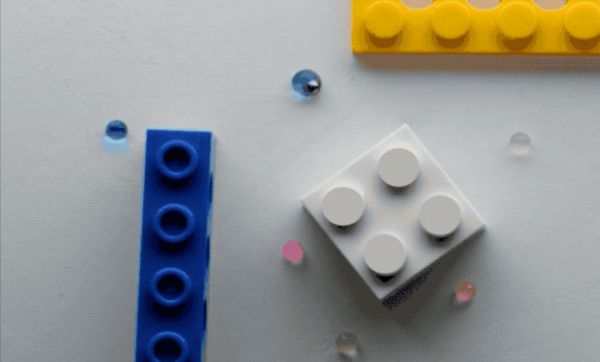
Hydrobot 可以作为一个清洁机器人来吸附超疏水表面狭窄角落的灰尘。在概念实验中,研究人员用硫酸铜(CuSO4)模拟灰尘,将其放置在由积木构成的封闭狭窄的超疏水表面上。
之后,可以用磁铁操纵水滴机器人穿过一个由积木组成的隧道,然后找到有尘埃的地方。当 Hydrobot 接触到 CuSO4 晶体时,它会迅速溶解,透明的 Hydrobot 逐渐变成蓝色,超疏水基底则变得干净,不同区域的晶体可以一次溶解掉,最终,水滴机器人可以离开工作区,回到起点,整个清洗过程不会对超疏水表面造成任何损坏。
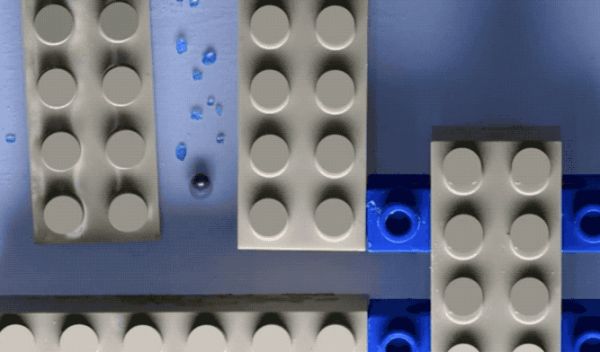
图|Hydrobot 清理晶体灰尘
(来源:Cell Reports Physical Science)
目前,无约束毫米级软机器人最重要的用途之一是在人类无法到达的狭窄空间中捕获/运输和卸载微小设备。此前已报道的大多数无约束毫米级软机器人都具有良好的承载能力,然而,让他们执行任务需要复杂的命令和扭曲,这在工程上是一个巨大的挑战。
Hydrobot 可以利用表面张力附着低质量、低密度的物体,例如当机器人通过磁场移动到聚苯乙烯泡沫塑料颗粒上时,这些泡沫颗粒可以立即附着在 Hydrobot 液体表面,然后跟随 Hydrobot 的运动,绕过多个障碍物,最终到达目的地。
研究人员还为 Hydrobot 设计了一种新的 “卸载” 方式,例如通过完全挥发液体,液体和固体之间的粘附力消失,被 “搬运” 的物体就可以自然而然地放在指定位置上,更重要的是,延迟卸载可以通过调节环境温度、水生物体积和相对湿度来实现。
如果一个 Hydrobot 机器人的承载能力有限,多个机器人一起工作,承载能力可以提高很多倍,并且还可以控制它们的运动路径和形式。
研究人员在论文中表示,如何实现多个机器人的近距离协同操作,将是团队下一个研究项目的重点,这或将是仿生微型机器人新兴领域的一个重大进展,有望开拓出更加丰富的应用场景。
“Hydrobot 可能为软机器人的未来设计提供一些新的想法。” Yifan Si 说,他表示,目前大多数软体微机器人都在使用固体材料,但它们的灵活再好,也不会像液体那样灵活,液体天然具备有利属性,比如改变形状和蒸发的能力。通过更多的研究,这些特性可以使 Hydrobot 更加通用。”
参考链接:
https://www.cell.com/cell-reports-physical-science/fulltext/S2666-3864(21)00134-X?utm_source=EA
https://www.eurekalert.org/pub_releases/2021-06/cp-wdb052621.php
https://www.dropbox.com/sh/bvbiji6c61s14lv/AADWsGY-xoPs3a_wTWs677GKa?dl=0
相关推荐
神奇,“水滴+铁珠”秒变机器人,移动速度可达2米/秒,还有清洁功能
你随便动幕布,投影跟不上算我输:动态投影黑科技,AE特效秒变成真
《黑客帝国》重现!人脑植入机器人,秒速获取知识
AI助你重温经典:老电影渣画质秒变4K超高清
获千万级Pre-A轮融资,「R-storm」要加速高空清洁机器人落地
36氪首发 | 开发边缘计算平台进入数字创意&娱乐场景,「秒如科技」获数百万元种子轮融资
科氪 | 戴森智能吸尘机器人新品解读,软硬件同时升级的它表现几何?
为什么要重新定义“秒”?
主打匿名群聊秒抛社交,「吐水星」想让用户倾诉更自由
内容爆炸式增长,如何在短视频带货中“秒”获人心?
网址: 神奇,“水滴+铁珠”秒变机器人,移动速度可达2米/秒,还有清洁功能 http://www.xishuta.com/newsview44592.html
推荐科技快讯





- 1问界商标转让释放信号:赛力斯 94971
- 2人类唯一的出路:变成人工智能 19421
- 3报告:抖音海外版下载量突破1 19152
- 4移动办公如何高效?谷歌研究了 18658
- 5人类唯一的出路: 变成人工智 18520
- 62023年起,银行存取款迎来 10140
- 7网传比亚迪一员工泄露华为机密 8210
- 8顶风作案?金山WPS被指套娃 7110
- 9大数据杀熟往返套票比单程购买 7055
- 10五一来了,大数据杀熟又想来, 7030



