小鹏L2事故背后:是技术不行,还是司机违规操作?

使用L2自动驾驶,驾驶员一定要随时注意路况。
小鹏也出现了一起L2自动驾驶相关事故。
昨天中午,一位小鹏车主声称自己朋友在高速上驾驶小鹏P7时,在开启NGP(自动导航辅助驾驶,L2级自动驾驶系统)的情况下追尾了前方板车。
事故导致小鹏P7车头部位受损严重,前机盖全部翘起。好在安全气囊及时弹出,车头碰撞溃缩驾驶舱未出现严重损毁,驾驶员无生命危险。当事人送医救治后确诊为脑震荡,现已在当地医院住院治疗。
作为新造车三强之一,小鹏这起事故发生后在网络上出现了不少关注和讨论。
▲行车记录仪拍摄的撞击全过程
P7全车搭载了31个传感器,还在全球率先使用了英伟达此前最先进的Xavier自动驾驶芯片。以这些硬件为支撑,小鹏NGP系统是全球量产车中少有的几款同时具备自动变道+自动导航辅助驾驶功能的产品,在业内属于比较领先的系统。
但为什么这样一套先进系统,却无法识别一台大卡车呢?
车东西今日向小鹏汽车公关负责人询问了事故原因,其回复称:“根据后台检测的行车数据,进行了初步的分析,在发生碰撞前,系统的前车识别及车辆控制,安全带震动提示,车辆预警,AEB等功能均处于正常工作状态。进一步分析结果,将待车主恢复后,我们共同复盘。”
显然,小鹏方面目前对事故原因仍未有定论。
事故发生后,车主和其朋友表示当时车辆开启了NGP功能,并以120公里/小时的时速行驶。
根据车主和其朋友的叙述,以及结合现场视频初步判断,此次事件的争议点是车主方认为小鹏NGP功能存在缺陷,而视频则显示车主即将发生碰撞时似乎并未及时接管车辆。
同时从视频发现,挂车载货后从后方看是一个锥形堆垛造型,外形与常规卡车有较大区别,异形车辆可能是NGP未及时减速制动的关键原因。
而为了弄明白事故背后到底发生了什么,以及可能存在的原因,车东西也与来自车企、Tier1企业、自动驾驶公司的多位专家进行了长时间的交流后,找到了可能的答案。
本文福利:小鹏自动驾驶技术究竟如何?分享报告《小鹏的破局:押注自动驾驶,重构商业模式》,公众号对话框回复【车东西0261】下载。
01.写在前面:L2驾驶员负责任
根据SAE和工信部《汽车驾驶自动化分级》标准,小鹏的NGP系统属于SAE L2级自动驾驶系统,或是2级驾驶自动化系统。
L2系统仅在设计的工作范围(条件)内,对车辆进行纵横向控制(转向和油门/刹车),驾驶员需要随时关注路况并准备接管。如果超出系统工作范围的情况下出现事故,驾驶员需要负责。
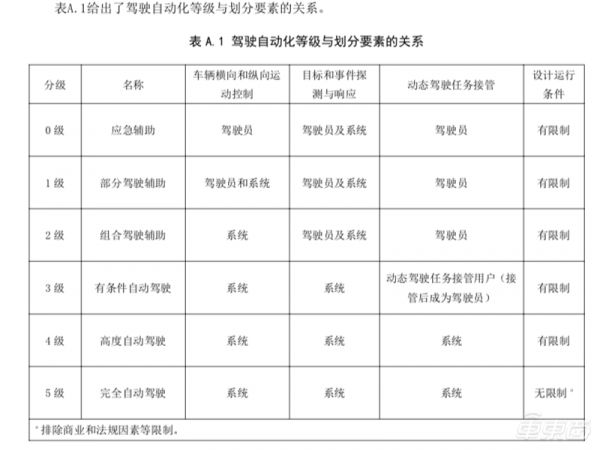
▲工信部驾驶自动化等级与划分要素关系图示
因为现实路况千差万别,随时可能出现超出系统工作范围和条件的情况,所以驾驶员需要随时盯着路况并准备接管车辆。
在这次事故中,P7快速接近前方卡车并且没有减速动作,显然已经超出了系统的工作范围和条件,驾驶员应该立即接管来避免事故。
所以根据目前L2系统的定义来看,本次事故的责任在于驾驶员没有关注路况和及时接管。
另外需要指出的是,小鹏汽车的NGP有严格的使用限制和说明。用户需要在车机上阅读相关的说明和限制条件后,才能在车机内打开这一功能。
当然,也不是说L2驾驶员负责厂家就可以随意推卸责任了。
举个例子,假设在车辆在车道线清晰的道路中开启L2居中行驶,车辆系统突然抽风,车辆在没有外界和人为干扰的情况下突然撞向道路的护栏,这显然就是车企的L2系统存在问题。
但在本次事故中,从视频来看车辆并没有这类异常表现。
在视频最后可以依稀听见,从副驾驶一侧(行车记录仪位于副驾驶侧)传来“醒醒,醒醒,能下车吗?”的声音。
这似乎是副驾驶上的乘客在呼喊驾驶员。但是就现在的视频来看,并不清楚是驾驶员撞击之前睡着了还是受到撞击后意识不清醒。
接下来车东西会从技术角度,详细分析本次事故的可能原因,最终原因仍然需要等待监管机构和小鹏方面予以公布。
02.碰撞前有提醒 为啥AEB没刹住?
小鹏P7搭载了博世最先进的第五代毫米波雷达(周身总计5颗),并且内嵌了博世的碰撞预警和AEB算法。
这套AEB系统仅基于博世的毫米波雷达进行目标感知,并对潜在的碰撞风险做出预警和制动动作。

▲小鹏P7
根据车内记录仪的视频,车辆碰撞前发出了“嘀嘀嘀”的声音,即是AEB系统的报警音。
单从视频画面来看,无法确定这台P7的AEB系统是否在最后一刻进行了刹车。但可能存在两种情况:
1、AEB系统在最后时刻进行了刹车,但为时已晚无法避免碰撞。
2、AEB系统仅给出了声音提示,并未做出刹车动作。

▲事故现场
为啥会有第二种情况?
因为博世会跟车企一起,给AEB系统同样设定一个工作条件,比如前车的速度如果超过一定的数值,就不会进行制动而仅仅是给出提示。
在这次事故中,车主朋友发帖表示,当时前方卡车的速度大概为60公里/小时,很有可能超出了AEB的工作范围,所以给出了提示音却未刹车。
03.到底为啥会撞?卡车造型太奇特
小鹏的NGP与其他大部分L2系统一样,也是采用了视觉(摄像头)+毫米波雷达(博世第五代产品)的感知方案。
工作时,两种传感器会各自感知目标,然后系统会对各自感知的目标结果进行融合(相当于交叉验证),最终根据融合结果做出减速等行驶动作。
需要注意,博世的雷达内嵌有感知算法,所以雷达会直接给NGP输出雷达的感知目标,最多256个。视觉算法系小鹏自主研发,小鹏会拿着自己的视觉感知结果和博世给出的雷达目标进行融合,然后再做出驾驶决策。

▲小鹏P7部分车型的传感器配置
说完传感器配置,我们回到事故本身。
既然发生碰撞,最大的可能就是NGP的感知系统没有感知到前方卡车,因而没有提前减速。同时AEB在最后时刻也无法力挽狂澜,所以给撞了。
那NGP为啥没看到前方那么大的一辆卡车呢?我们从毫米波雷达和视觉两部分来说。
毫米波雷达依靠回波探测物体,并且对移动的物体非常敏感(对静止和缓行物体不敏感)。在该场景中,前车速度既然已经在60公里/小时,所以毫米波雷达几乎不可能没看到卡车。
另外,因为AEB系统在最后时刻发出了提醒声音,其实已经说明雷达是看到了卡车。
所以感知失败的锅,大概率在视觉方面。
P7挡风玻璃上安装了一个三目前视摄像头系统和一个单目摄像头。前者是三个不同镜头的感知系统(长焦、广角和标准镜头),并没有使用立体视觉。后者主要给360环视和记录仪提供感知。

▲车头受损严重
因为是摄像头阵列,所以P7其实看的又远又宽,按道理不可能看不到这么大一个卡车,问题出在哪?
车东西在与多位自动驾驶工程师交流后,对方都强调称这个卡车的形状太过特殊——尾部是一个低矮的平板,完全遮挡了轮子,属于异形车。
对目前的感知算法来说,如果没有见过这种车辆并积累相关的数据,很难被系统识别为一台需要做出反应的车辆。
这样一分析,可能的结论就是:雷达探测到前方有动态障碍物,但视觉却没发现。

▲挂车的尾部是一个低矮的平板
接下来是重点。
国内目前量产的L2自动驾驶系统有不少都将视觉作为主传感器,(权重高),雷达当作辅助传感器(权重低)。
如果视觉发现障碍物,不管雷达有没有发现,车辆都会做出反应,但反过来就不行。
比如只有雷达看到前方有障碍物,系统会等待视觉给出结果再做反应。如果视觉始终没有给出结果,干脆就不反应——毕竟L2还有人类驾驶员兜底。
所以具体到这起事故,可能的原因正是因为视觉没看到,或者没有及时看到,才导致碰撞。

▲被追尾的挂车轻微受损
04.L2事故频发 两种路径解决问题
小鹏的这起L2自动驾驶事故并非国内首次。
蔚来最近出现的两起NOP(蔚来的L2级自动导航辅助驾驶系统)事故跟小鹏这次非常相似——都是因为前方有异形车辆导致视觉感知失效,最终撞了上去。第一次是一个横在路边的五菱面包车,第二次则是一台高速公路养护车辆。
但需要注意,蔚来NOP的两次事故比P7这次更加极端。
当时撞上的五菱面包车和养护车辆一个处于静止状态,一个处于缓行状态。
因为毫米波雷达的物理特性,对静止物体和缓行物体的检测比较困难,再加上博世等雷达厂商的雷达算法会过滤掉一些静态目标(因为无法准确区分是车辆还是护栏),所以蔚来的NOP事故中,相当于是两个传感器都失效了。

▲蔚来NOP事故现场
特斯拉的Autopilot系统此前也出现过多起事故,比如撞上横在路中间的卡车,或者翻倒在地上的卡车。
本质原因都是碰上了异形障碍物视觉“瞎了”,且物体处于静止状态,雷达也将其过滤掉了。或者雷达的感知权重不够,系统不予采纳感知结果。
这是目前视觉+毫米波雷达的传感器配置所造成的,更是当下量产自动驾驶系统的技术水平和成本结构所决定的。
视觉和雷达的感知结果经常会出现打架的情况,必须选择一个主传感器,以便在冲突的时候决定信谁。
视觉能够提供非常丰富的场景信息,毫米波雷达则只能给出一些相对模糊的信息——要么是几个目标(雷达厂家给的目标)、要么是一堆模糊的点云。
所以视觉自然成了特斯拉、Mobileye、小鹏、蔚来等车企选用的主传感器。
这些车企的自动驾驶团队当然知道这一局限,一方面其在用户手册或者车机系统中反复强调系统会在多种情况下失效,需要驾驶员随时注意路况准备接管,尽到了提醒义务。
另一方面,车企们也在探索根本的解决办法。
艺高人胆大,连太空都敢上的特斯拉选择了纯视觉路线。他们一方面扔掉毫米波雷达避免感知打架的问题,另一方面疯狂打磨自己的人工智能技术,把视觉感知做到了极致。
比如他们搞出了一个名为HydraNet的超级神经网络,内部整合了48个子网络,能够同时检测1000种物体。而为了训练这个超级神经网络,他们在GPU上训练了超过7万个小时。
在今年的特斯拉AI Day上,特斯拉又推出了自己的AI芯片D1,并基于数千颗D1打造了一个超级计算单元ExaPOD,BF16/CFP8算力高达1.1EFLOPS,就是专门用来训练其人工智能算法。
小鹏、蔚来、智己、长城、极狐等国内车企则选择了增加激光雷达的做法。新上市的小鹏P7,近一两年内将上市的极狐阿尔法S、长城Wey摩卡(激光雷达版)、蔚来ET7、智己L7都将搭载激光雷达。
有了激光的加持,将极大提升车辆的感知能力。面对异形障碍物,激光既能测距,又能将其形状以点云的方式呈现出来,大幅弥补了视觉和毫米波雷达的缺点,形成了非常稳健的感知组合。
毕竟目前全球做自动驾驶最强的谷歌Waymo,也离不开激光雷达。
本文来自微信公众号“车东西”(ID:chedongxi),作者:晓寒,36氪经授权发布。
相关推荐
小鹏L2事故背后:是技术不行,还是司机违规操作?
特斯拉蔚来们鼓吹的自动驾驶,故事还是事故?
蔚来事故背后,“致命弯道”在辅助驾驶和自动驾驶之间
挖来了高材生,小鹏汽车能跑在前面吗?
揭秘特斯拉Autopilot致命事故内幕:过度依赖技术致分心驾驶酿惨剧
自动驾驶L2来了,它会让驾驶更轻松吗?
31岁企业家命丧蔚来背后
蔚来“自动驾驶致死”的台前幕后:对未成熟的致命诱惑,车厂和车主都太乐观了
小鹏亏本卖小鹏
美国再次调查特斯拉,这次是玩真的了?
网址: 小鹏L2事故背后:是技术不行,还是司机违规操作? http://www.xishuta.com/newsview51041.html
推荐科技快讯







- 1问界商标转让释放信号:赛力斯 95178
- 2人类唯一的出路:变成人工智能 20885
- 3报告:抖音海外版下载量突破1 20771
- 4移动办公如何高效?谷歌研究了 20054
- 5人类唯一的出路: 变成人工智 20036
- 62023年起,银行存取款迎来 10307
- 7网传比亚迪一员工泄露华为机密 8456
- 8五一来了,大数据杀熟又想来, 8338
- 9滴滴出行被投诉价格操纵,网约 7960
- 10顶风作案?金山WPS被指套娃 7213



