清华伯克利造出机械小强:承重200万倍踩不死,跑得和真蟑螂一样快
编者按:本文来自微信公众号“量子位”(ID:QbitAI),作者 郭一璞 安妮,36氪经授权发布。
打不死的小强,真的是太讨厌了!
既然打不死,那……干脆仿造一个出来,为我所用,岂不是爽歪歪?
还真有人仿造成功了,最新的一期Science Robotics,就发表了这样一个打不死、压不扁的小强机器人。外媒IEEE Spectrum在报道时,甚至用了“惊人”(surprisingly)一词。
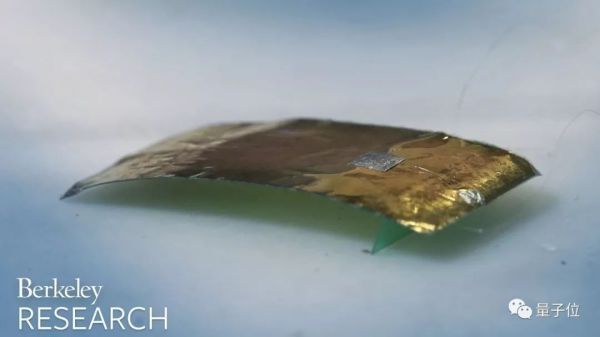
这个小强机器人长3厘米,宽1.5厘米,体重0.024克,只有一枚硬币大小,运行的时候最低只要8V的低电压。
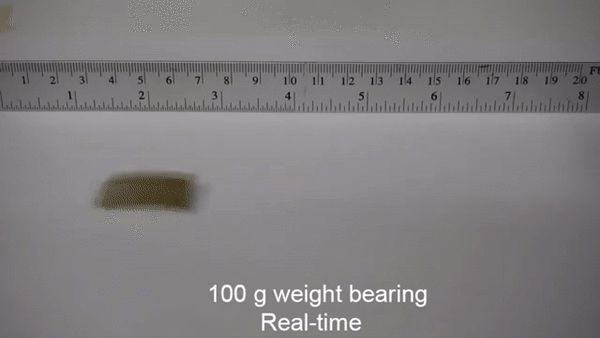
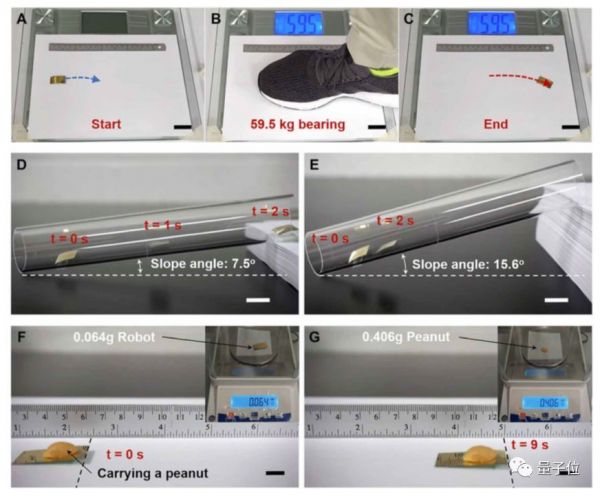
最大的特点是耐压,拿100g的砝码压住它,拿起来之后毫发无损,还能继续淡定的向前跑。
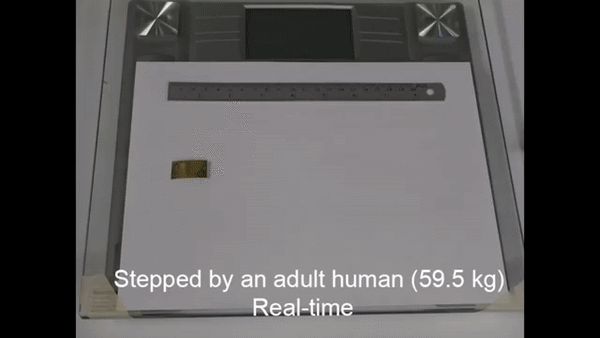
甚至,体重119斤的成年人踩上去,它也照样可以往前跑,这个承重大约是小强机器人自己的248万倍。
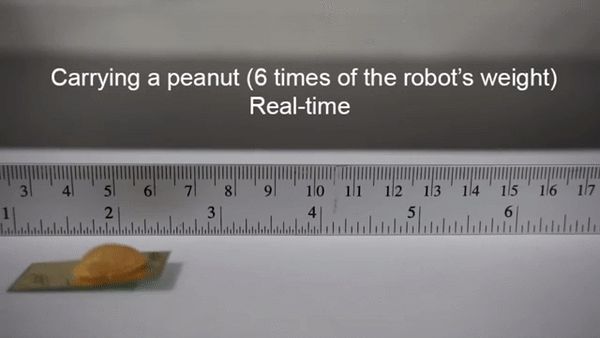
论载重能力,它还能背着自己体重6倍的东西一起走。
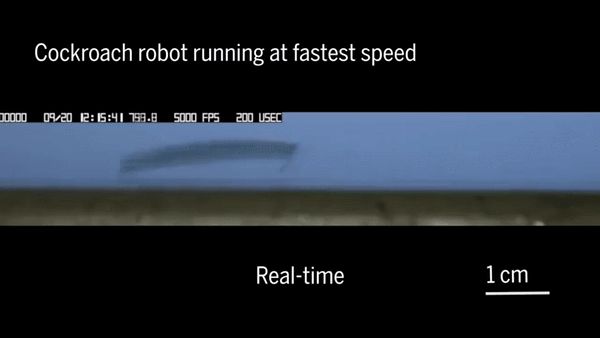
跑起来的速度也相当快,最快每秒可以跑20倍自己的身长的距离。
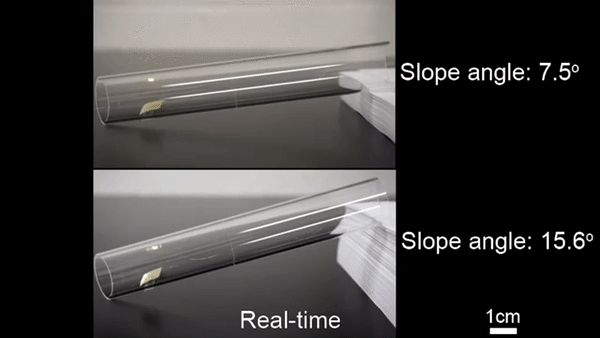
不只平地运动,还可以爬7.5度倾斜的坡。
因此,这款体型娇小而健壮、运动机能全面的小强机器人,最适合的应用场景怕不是深入狭窄的缝隙,进行一线调查工作?
本文的一作吴一川也这么觉得,他说:“如果发生了地震,大型机械、大型犬很难在废墟下找到生命,因此我们需要一个敏捷而健壮的小型机器人。”
甚至还有网友觉得,很快这种机器人就会安装上间谍软件,悄悄潜入人们身边了。

还有人觉得,这种机械蟑螂可能和真的蟑螂一样可怕:它们只要找到你家的门在哪儿,人类就完蛋了。

小强的结构
小强机器人的核心组成是一个略微弯曲的“甲壳”和前面甲壳下的腿。
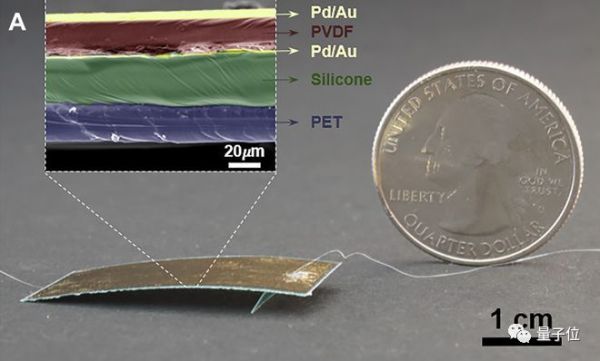
从显微镜图像来看,甲壳部分有5层,从上到下依次是:
50nm Pd/Au电极
18μm厚的PVDF层
50nm Pd/Au电极
25μm的硅粘合剂
25μm的PET材料
PVDF是一种压电材料,给它两端加上电压后就会收缩或膨胀。因此,当给PVDF加上交流电的时候,它就会反复在弯曲和伸直的状态之间变化,这样甲壳的形状也就随之变化,被赋予了弹跳运动能力。
所以,当小强机器人跑起来的时候,它的甲壳是在不断弯折的,以直-弯-直-弯……这样循环变化弹跳运动。
另外的一个核心部分是小强的前腿,它支撑小强身体,弹跳的时候也要靠腿来落地支撑。
在弹跳的过程中,为了保证小强机器人尽量向前运动,研究者们把前腿稍微往后“掰”了一下,保证前腿和下半身躯干之间的角度小于90°。
拆解“小强”运动过程
这样一片身材小小、体态薄薄的机器人,是如何完成跑步、爬坡和负重任务的?
在论文Insect-scale fast moving and ultrarobust soft robot中,研究人员解释了小强机器人的运动原理。
具体的运动状态,研究者们用60V、200Hz的正弦交流电做了演示。
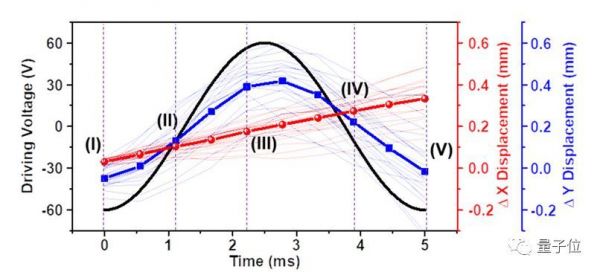
这张图是小强机器人经过了20个周期的运动后平均出来的几个核心的数据。
黑色的是驱动信号,也就是正弦交流电的波形图,因为用的是200Hz的交流电,一个周期也就是5ms;
红色是一个周期内小强机器人前进的距离,大约不到0.4毫米。注意,因为这里的电压最高只有60V,所以达不到每秒20倍体长的最高运动速度。
蓝色则是小强机器人脊背的高度变化,随着电压波动,在电压为-60V、0V、60V、0V这四个时间点上(也就是图上的I、II、III、IV),小强一直在变化自己的身姿,脊背的高度也在随着波形变化;而当一个周期结束,电压回到-60V的时候(也就是图上的V),小强的姿势也回到了最初状态。

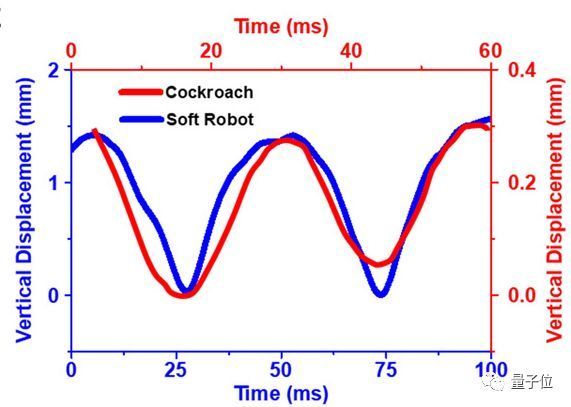
如果将小强机器人运动中的脊背高度变化拉长,拉到和生物界中真的小强一样的运动周期50毫秒,会发现两者的脊背高度波动几乎是重合的。
受到电压影响,小强机器人共有四种姿态,分别为腾空态(aerial),II前触态(front-touching),后触态(back-touching)和III双触态(both-touching)。
这四个状态连在一起,构成机器人一个步态周期,从肉眼上看,就是机器人向前跑了一步。
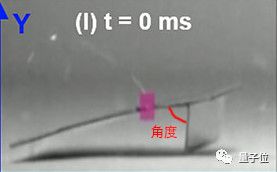
来看高速摄像机下的小强机器人,从A到D分别为上述四种姿态,以及其身体受力分析:
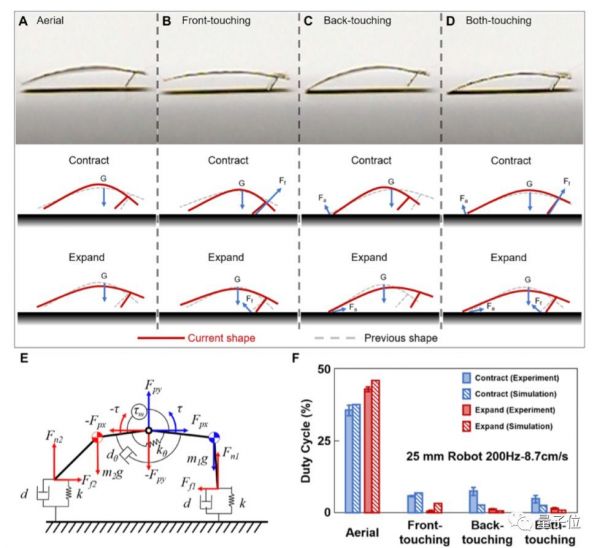
其中,灰色虚线表示此前的形状,红色表示的时当前的形状,G代表重力,Ff代表前腿的地面反作用力,Fa表示腹部末端的地面反作用力。
完成一次跑步动作的周期是5毫秒,频率为200Hz。跑步的过程还有一个腾空的阶段。
那么,小强机器人如何完成每秒前进相当于20个自身长度的距离?
研究人员先绘制了不同动物体重(横轴)运动速度(纵轴)的分布图,来看一下:
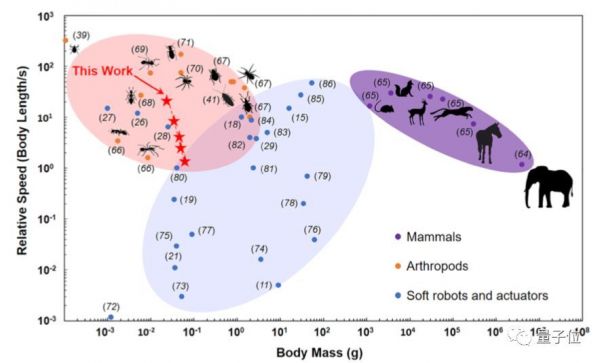
其中紫色区域代表哺乳动物,橙色区域代表节肢动物,蓝色区域代表不同软体机器人的与体重的相对运行速度。
从这个大趋势中可以看出,对于哺乳动物来说,体重越小速度大多数就越快,但对于软体机器人来说这个规律恰好相反,体重减小、但速度也随之变慢。
知道了大规律之后,研究人员开始对小强机器人进行一系列的优化,图中红色五角星就为预设的优化策略。
因为机器人的运行速度与谐振频率正相关,因此这个小型机器人可在较高的谐振频率下运行获得更快的相对速度。
研究人员表示,虽然一些由磁场、湿度、热源或光源驱动的软体机器人的瞬时运行速度可以很快,但其响应速度较慢,其动力装置也比较笨重,因此放弃了这些探索。
最后,看一下小强机器人在爬坡和负重环境下的表现。
论文显示,它可以承受自身体重100万倍的重量,约60公斤,并且还能以正常速度的一半继续向前爬行。
即使攀爬15度的斜坡,仍范能以每秒一个体长的速度前进。
甚至,还能当小小搬运工,比如携带一颗是自身重量6倍的花生:
达不到完美
不过,这个小强机器人还有很多可优化的空间。
一是目前还不太自由,小强机器人需要被拴在一根细电线上。研究小组正在尝试为机器人添加一块电池,这样不需电线就可以直接行走了。
二是小强机器人目前还无法自主避障,研究人员表示,正在尝试增加气体传感器,也在改进小强机器人的设计,使其最终能够跨越障碍物。
不过,无论是增加电池还是增加气体传感器,对于一般体型的机器人来说可能不是件难事,但若要将这两种装置安装在一块如此轻薄、耐踩的机器人身上,还是一项巨大的挑战。
清华+伯克利出品
这篇论文来自清华大学和加州大学伯克利分校,作者共有13人。
一作Yichuan Wu,本名吴一川,是一位中国人,目前是清华-伯克利深圳学院(TBSI)的在读博士生。
吴一川本科毕业于中国农业大学机械工程专业,硕士毕业于清华大学机械工业专业,主要研究领域为计算机数字控制系统。

△ Yichuan Wu,来自Google Scholar
读博期间,吴同学的研究方向为柔性传感器和制动器,师从UC伯克利机械工程系教授、伯克利传感器和执行器中心主任林立伟教授,林立伟也是本文的通讯作者。

△ 图来自百度百科
此外,作者团队中还包括UC伯克利电子工程与计算机科学系的Justin K. Yim, 清华-伯克利深圳学院的Jiaming Liang、Xiaohao Wang,UC伯克利传感器和制动器中心的Zhichun Shao, Mingjing Qi, Junwen Zhong, Zihao Luo等。
传送门
论文地址:
https://robotics.sciencemag.org/content/robotics/4/32/eaax1594.full.pdf
相关推荐
清华伯克利造出机械小强:承重200万倍踩不死,跑得和真蟑螂一样快
UC伯克利造出会“轻功”的机器人
真·鲁班:斯坦福学者造出带羽毛翅膀的「机器鸽」,登上Science及其子刊
侯小强「越过山丘」
少数派的一周猜想 | 如果在太空中诞生,人类将会变成什么样子?
你见过这样的机器人么?
考上清华退学,就为再考清华计算机?
少数派的一周猜想 | 已经有人悄悄地为生活在火星做准备了
真空竟能热传导,甚至能传播声音!华人团队新研究突破认知,登上Nature
潮科技 | 美国加州大学伯克利分校首次实现高速可编程、大阵列二维光学相控阵芯片
网址: 清华伯克利造出机械小强:承重200万倍踩不死,跑得和真蟑螂一样快 http://www.xishuta.com/newsview8159.html
推荐科技快讯







- 1问界商标转让释放信号:赛力斯 95228
- 2人类唯一的出路:变成人工智能 21183
- 3报告:抖音海外版下载量突破1 21148
- 4移动办公如何高效?谷歌研究了 20339
- 5人类唯一的出路: 变成人工智 20338
- 62023年起,银行存取款迎来 10336
- 7五一来了,大数据杀熟又想来, 8596
- 8网传比亚迪一员工泄露华为机密 8505
- 9滴滴出行被投诉价格操纵,网约 8215
- 10顶风作案?金山WPS被指套娃 7230



